Feilkildene ved normal funksjon kan inndeles i tre grupper: satellittene, signalutbredelsen og mottakerne. Satellittfeilene kommer via navigasjonsmeldingen og innebærer unøyaktige banedata og feil i informasjonen om satellittklokkens avvik fra GPS tidsreferanse. Til sammen gir disse to feilene en unøyaktighet i avstandsbestemmelsen på 0,5–1 meter.
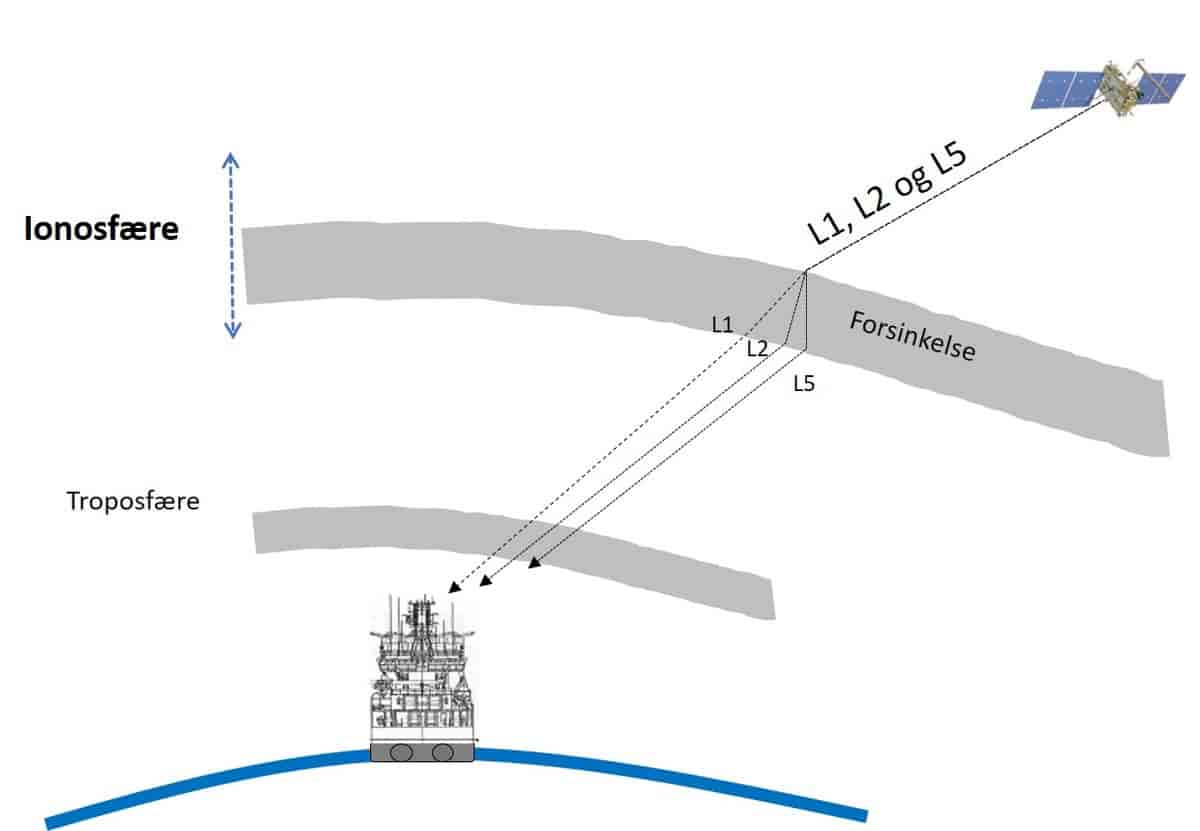
Signalenes utbredelseshastighet i Jordens atmosfære (ionosfære og troposfære) avviker noe fra hastigheten i vakuum, og siden avstanden beregnes ut fra utbredelseshastighet multiplisert med overføringstiden, vil dette ha betydning. Ionosfærens innvirkning er omvendt proporsjonal med bærefrekvensen i kvadrat. Denne frekvensavhengigheten kan benyttes i flerfrekvensmottakere for å beregne ionosfærefeilen, og dermed bedre nøyaktigheten betraktelig, fra en avstandsfeil på cirka 5–50 meter til rundt ti centimeter. For enfrekvensmottakere inneholder navigasjonsmeldingen modellbaserte koeffisienter som muliggjør reduksjon av ionosfærefeilen med i gjennomsnitt cirka 50 prosent ved beregninger i mottakeren. Troposfærens innvirkning (avstandsfeil på rundt 2–10 meter) er ikke frekvensavhengig, og reduksjoner gjøres ut fra innlagte modeller i mottakerne som gir restfeil på noen få desimeter.
En annen forholdsvis stor feilkilde er signalreflekser fra omgivelsene rundt mottakerantennen, såkalt flerveisinterferens (multipath interference). Ved kodemålinger kan dette medføre at avstandsfeilen bli titalls meter, verst for mottakere som står i ro. Problemet kan reduseres med avansert signalbehandling i mottakerne og ved presisjonsmålinger ved hjelp av spesielle antennearrangementer. Ved kodemålinger på to frekvenser er slike reflekser den største feilkilden.
Så vel atmosfærefeil som refleksjoner er vanligvis størst for satellitter som befinner seg lavt over horisonten. Derfor brukes kun satellitter over en viss minste elevasjonsvinkel, oftest omkring 10°.
Feilbidrag fra mottakerne kommer fra støy i forskjellige former og fra unøyaktigheter i beregningene. Mottakerfeil bidrar med cirka en halv meter til avstandsfeilen.
Tallverdiene for feilbidrag beskrevet over er såkalte 1-sigmaverdier (standardavvik), det vil si cirka 67 prosent av alle måletilfeller inneholder feil som er mindre enn den nevnte verdien. Fordi feilene er statistiske og uavhengige av hverandre, må de adderes kvadratisk, og den totale avstandsfeilen blir kvadratroten av summen av de kvadrerte feilbidragene.
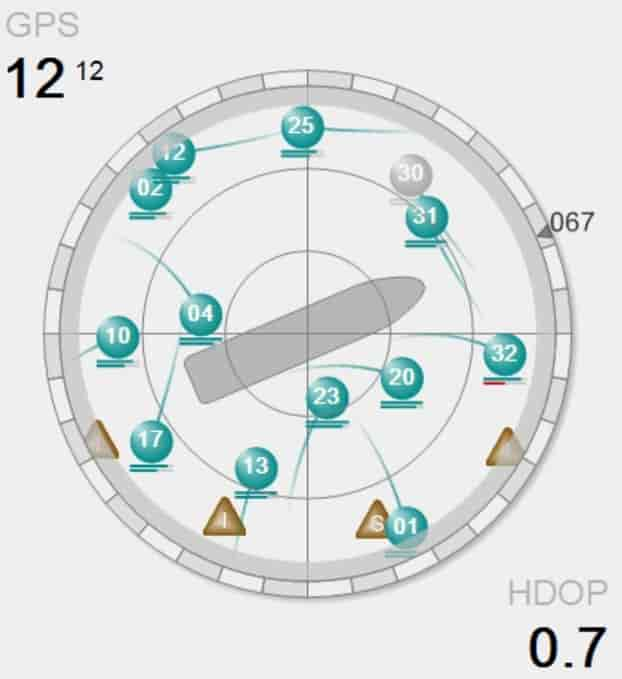
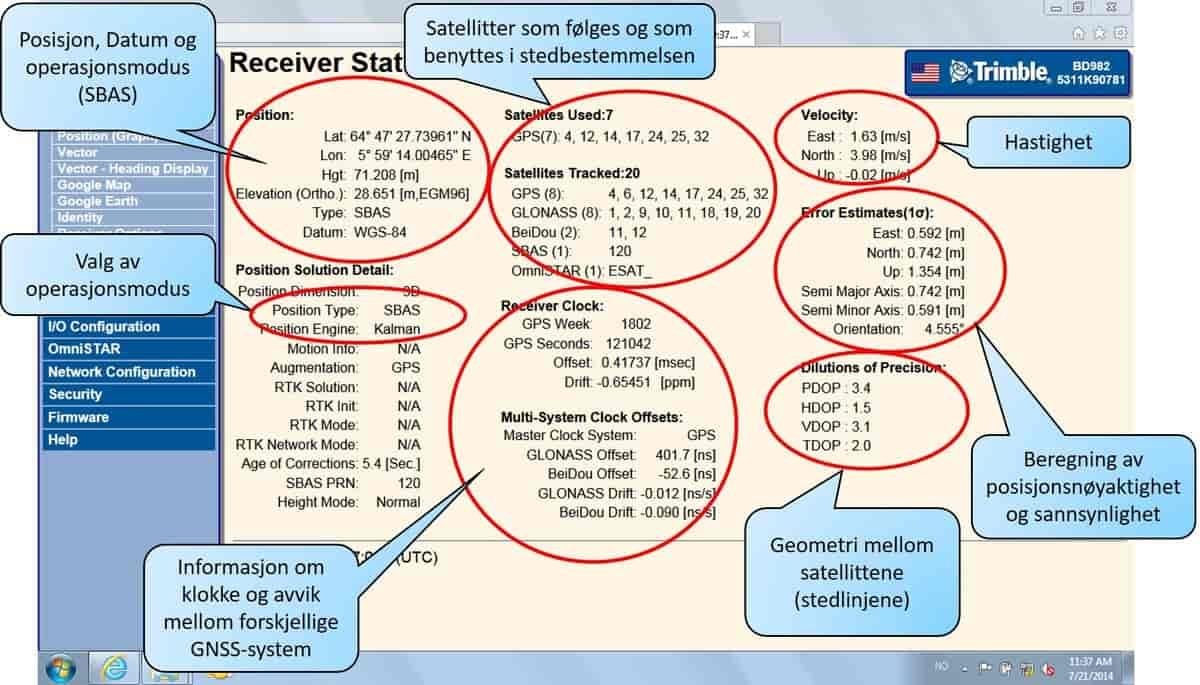
Feil i bestemmelsen av avstand til satellittene gir seg uttrykk i posisjonsfeil. Disse posisjonsfeilene kan beregnes som et veiet produkt av avstandsfeilene og en såkalt geometrifaktor (Dilution Of Precision, DOP) som er forskjellig i ulike retninger, avhengig av retningene til satellittene sett fra mottakeren. Midlere horisontal DOP-faktor, HDOP, er cirka 1,5, det vil si at posisjonsfeilen horisontalt blir cirka 50 prosent større enn feilen i avstandsbestemmelsen. Vertikalfeilen blir i gjennomsnitt cirka 50 prosent større enn horisontalfeilen, fordi det er mindre sannsynlig at en satellitt er høyt enn at den er lavt over horisonten. Geometrifaktoren ved bruk av fire satellitter blir minst hvis én satellitt er i senit og de øvrige tre er jevnt fordelt i horisontalplanet og har lav elevasjon.





Kommentarer (2)
skrev Ivar Røise
I artikkelen står:
"Siste generasjons satellitter bidrar blant annet med å formidle nødmeldinger fra utløste nødpeilesendere."
Dette stemmer vel ikke? Slik formidling ville innebære at nødpeilesenderne sender noe til satellittene - og det gjør de da ikke?
Det står i så fall i motsetning til litt lengre ned i artikkelen;
"Det sendes ingen signaler den motsatte veien."
svarte Ivar Røise
Bare glem kommentaren. Jeg ser at jeg burde ha lest artikkelen ferdig før jeg postet den.
Kommentarer til artikkelen blir synlig for alle. Ikke skriv inn sensitive opplysninger, for eksempel helseopplysninger. Fagansvarlig eller redaktør svarer når de kan. Det kan ta tid før du får svar.
Du må være logget inn for å kommentere.