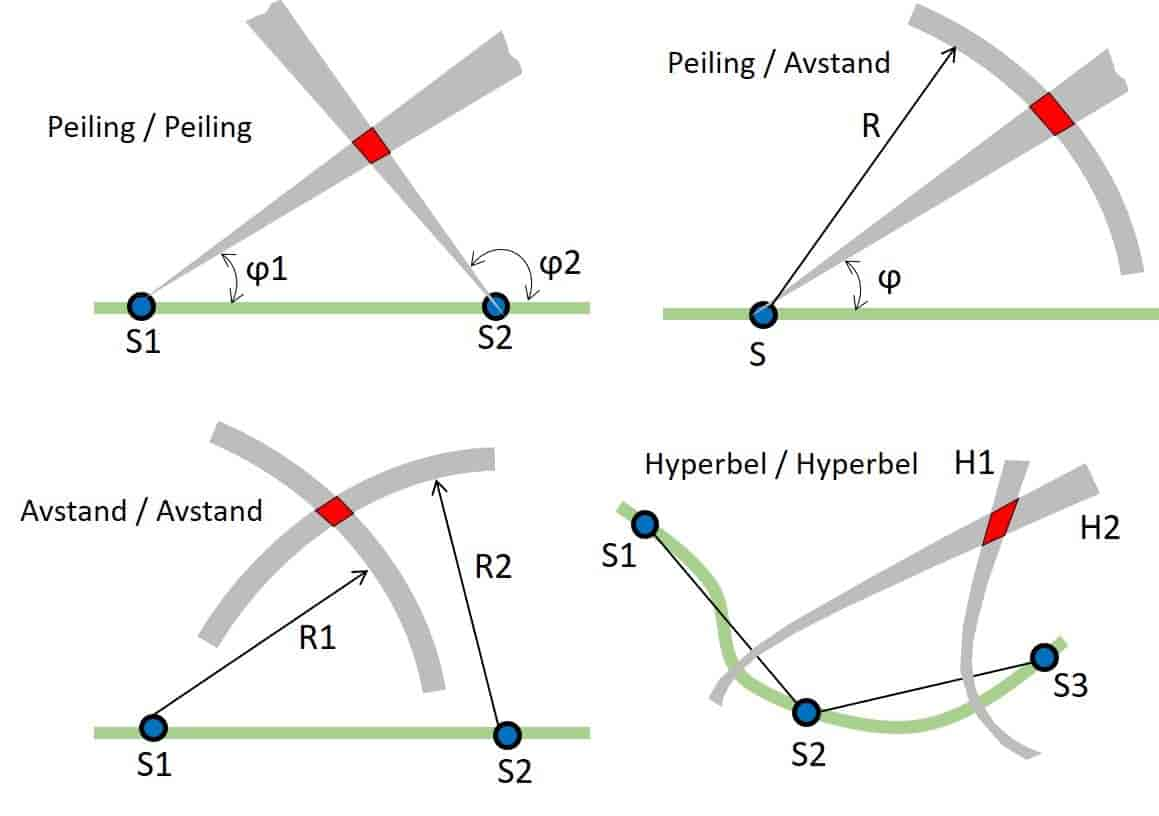
Radionavigasjon har utviklet seg parallelt med radioteknikken, og i de fleste tilfeller har det blitt drevet frem av militære behov. De første systemene for radiopeiling ble utviklet etter første verdenskrig både for bruk i fly og skip, og det ble opprettet en lang rekke radiostasjoner (radiofyr) for bruk i navigasjon. Etter andre verdenskrig ble det en omfattende utbygging av slike stasjoner også for sivil navigasjon, herunder det litt mer sofistikerte Consol-systemet. Identifikasjonen av radiostasjonene var normalt basert på en gitt unik frekvens og morsekode. Nøyaktigheten man kunne oppnå på denne tiden var begrenset av antenneutstyret og avstanden til senderen, men kunne typisk ligge i størrelsesorden noe over en nautisk mil når avstanden ble stor.
I løpet av andre verdenskrig ble en rekke nye systemer utviklet for radiobasert avstandsmåling. Mest kjent er amerikanske Shoran og engelske Gee. Etter andre verdenskrig ble flere hyperbolske systemer utviklet, og systemer som Decca, Loran og Omega fikk stor utbredelse. Det var kun Omega som hadde en form for global dekning – ellers var dekningen gitt av forskjellige «kjeder» – typisk bestående av 4 stasjoner, som var plassert slik at stedlinjene (hyperblene) ga ønsket nøyaktighet i et gitt område. Nøyaktigheten til disse systemene kunne variere en god del, men under gunstige forhold kunne man oppnå nøyaktighet fra noen titalls meter til noen få hundre meter. Frem til slutten av 1970-tallet krevde det spesielle kart med trykte hyperbler for å sette ut en posisjon, men senere ble koordinater i bredde- og lengdegrader presentert direkte.
Parallelt med de nevnte systemene kom det en lang rekke kortdistansesystemer på markedet for å dekke behovene for nøyaktig posisjonering av fartøy på kontinentalsokkelen. Dette var kommersielle systemer som ble mobilisert til gitte operasjoner i et begrenset tidsrom. Utenfor norskekysten var systemer som Pulse/8, Hyperfix, Syledis og Microfix vanlige, men det fantes mange flere.
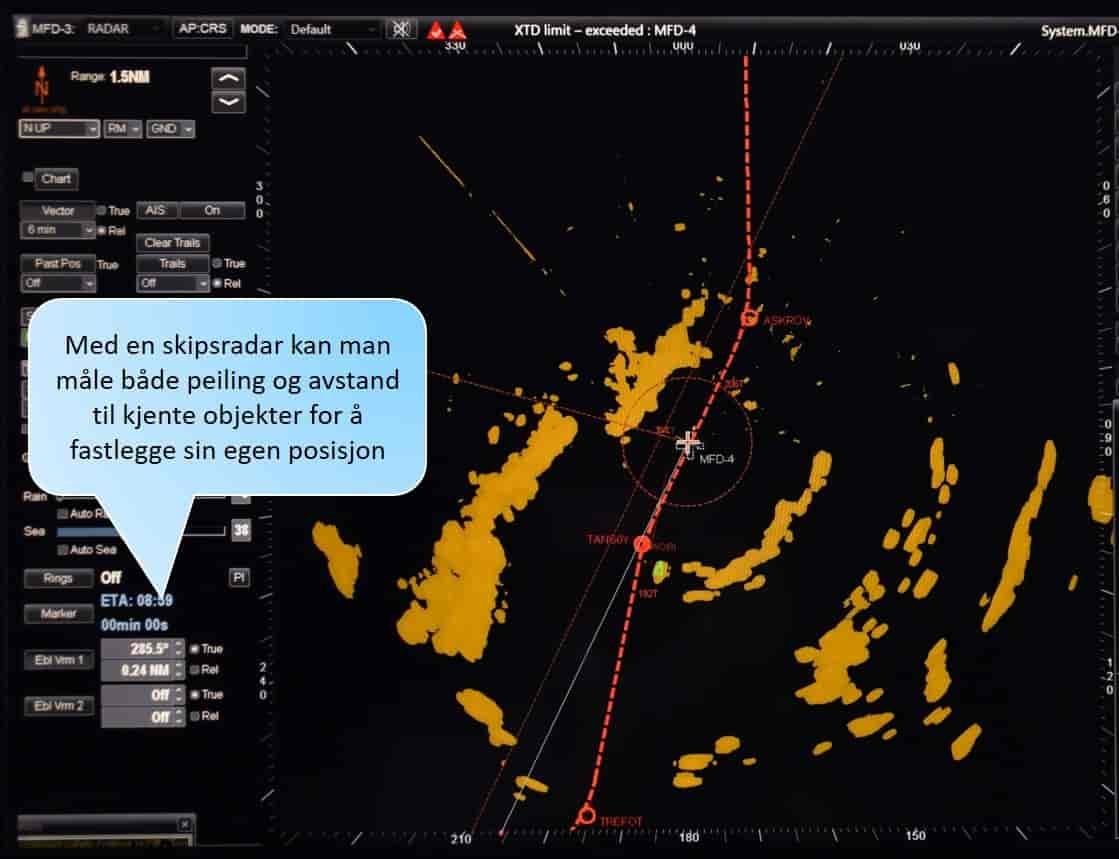
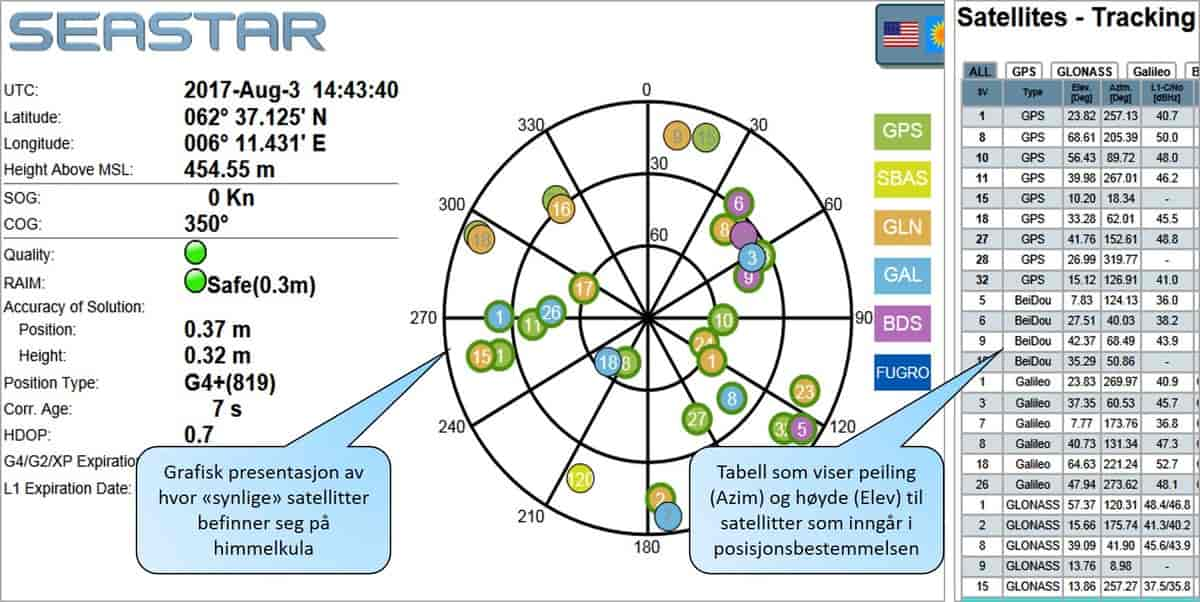
Etter hvert som GPS ble tilgjengelig utover 1990-tallet ble alle de nevnte systemene for maritim navigasjon gradvis lagt ned. I luftfarten dekker imidlertid bakkebaserte radionavigasjonssystemer som DME, VOR og ILS fortsatt et stort behov. Se også satellittnavigasjon og luftnavigasjon.


Kommentarer
Kommentarer til artikkelen blir synlig for alle. Ikke skriv inn sensitive opplysninger, for eksempel helseopplysninger. Fagansvarlig eller redaktør svarer når de kan. Det kan ta tid før du får svar.
Du må være logget inn for å kommentere.