Utviklingen av DP-systemer startet i 1961 ut fra behovene Shell hadde for boring på dypt vann i Mexicogolfen. Dette året satte selskapet i drift borefartøyene CUSS-1 og Eureka, som begge var utstyrt med azimut-propellere og automatisk styresystem. Det var Shell-ingeniøren Howard Shatto (1924–2018) som var pådriveren i denne utviklingen.
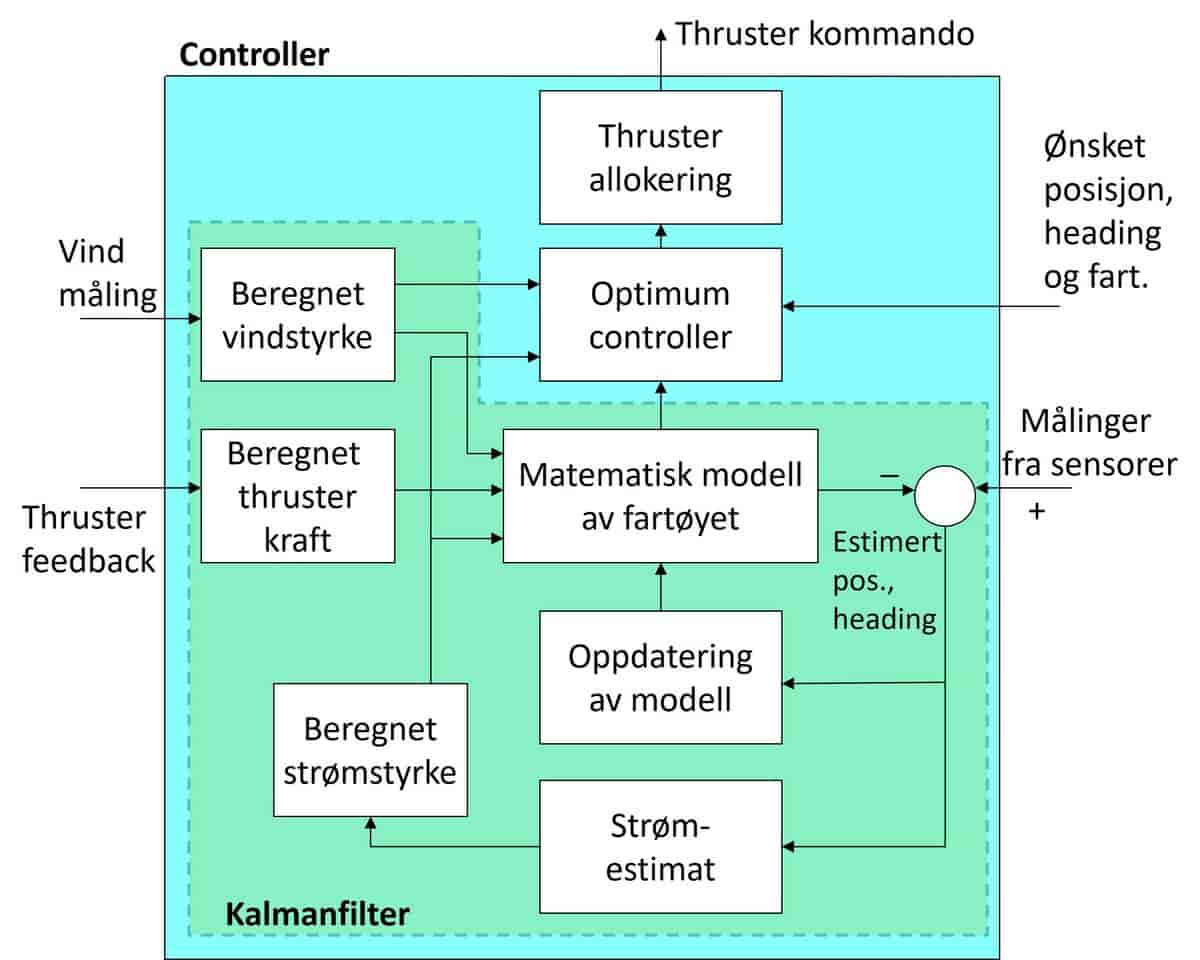
Den norske kybernetikeren Jens G. Balchen (1926–2009) ved NTH (nå NTNU) kjente til denne utviklingen, samt at han hadde godt kjennskap til det amerikanske kybernetikkmiljøet rundt ungarskfødte Rudolf E. Kálmán (1930–2016). Kalman regnes for opphavsmann for en reguleringsalgoritme som var i stand til å fjerne støy fra datastrømmer, senere kalt Kalmanfilter. Denne var blant annet avgjørende for de første månelandingene.
Med visjoner og kjennskap til utviklingen i USA tok Balchen i 1971 kontakt med Kongsberg Våpenfabrikk (KV) og mente at det var mulig å bygge bedre DP-anlegg enn det som amerikanerne gjorde. Behovene i Nordsjøen, kombinert med at norske rederier fikk installert amerikanske system av typen Honeywell, gjorde at flere norske industriaktører tok opp ideen et par år senere.
I 1974 etablerte KV, Simrad, CMI og Sintef prosjektet DYNPOS. Året etter ble første kontrakt inngått med Jakob Stolt-Nilsen på et anlegg til boreriggen Seaway Swan, og litt senere til dykkerskipet Seaway Eagle (1977). Dette var første skip med DP-system fra Kongsberg. Et norsk industrieventyr hadde startet, og Kongsberg Maritime er i dag en verdensledende leverandør av DP-systemer.
Andre norske automasjonsmiljø, som Rolls-Royce Marine (Ålesund), ABB (Oslo) og Robertson (Egersund) har også utviklet egne DP-systemer, men alle disse har blitt oppkjøpt og delvis innlemmet i Kongsberg Maritime. Men nye aktører kommer stadig til. Blant annet har propell og automasjonsleverandøren Brunvoll (Molde) DP-systemer som del av sitt produktspekter. Utenlandske konkurrenter til Kongsberg er blant annet Wärtsilä (tidligere Nautronix), General Electric (tidligere Converteam) og Marine Technologies (MT).




Kommentarer
Kommentarer til artikkelen blir synlig for alle. Ikke skriv inn sensitive opplysninger, for eksempel helseopplysninger. Fagansvarlig eller redaktør svarer når de kan. Det kan ta tid før du får svar.
Du må være logget inn for å kommentere.