
Hydroakustisk posisjonering (HPR) er en metode for nøyaktig posisjonering av skip eller undervannsfarkoster. Metoden bygger på bruk av lydpulser som sendes mellom skipet og en eller flere sendere (transpondere) på havbunnen eller på undervannsfarkosten. På denne måten fastlegges avstand og retning (peiling) til transponderen, og posisjon kan beregnes.
hydroakustisk posisjonering
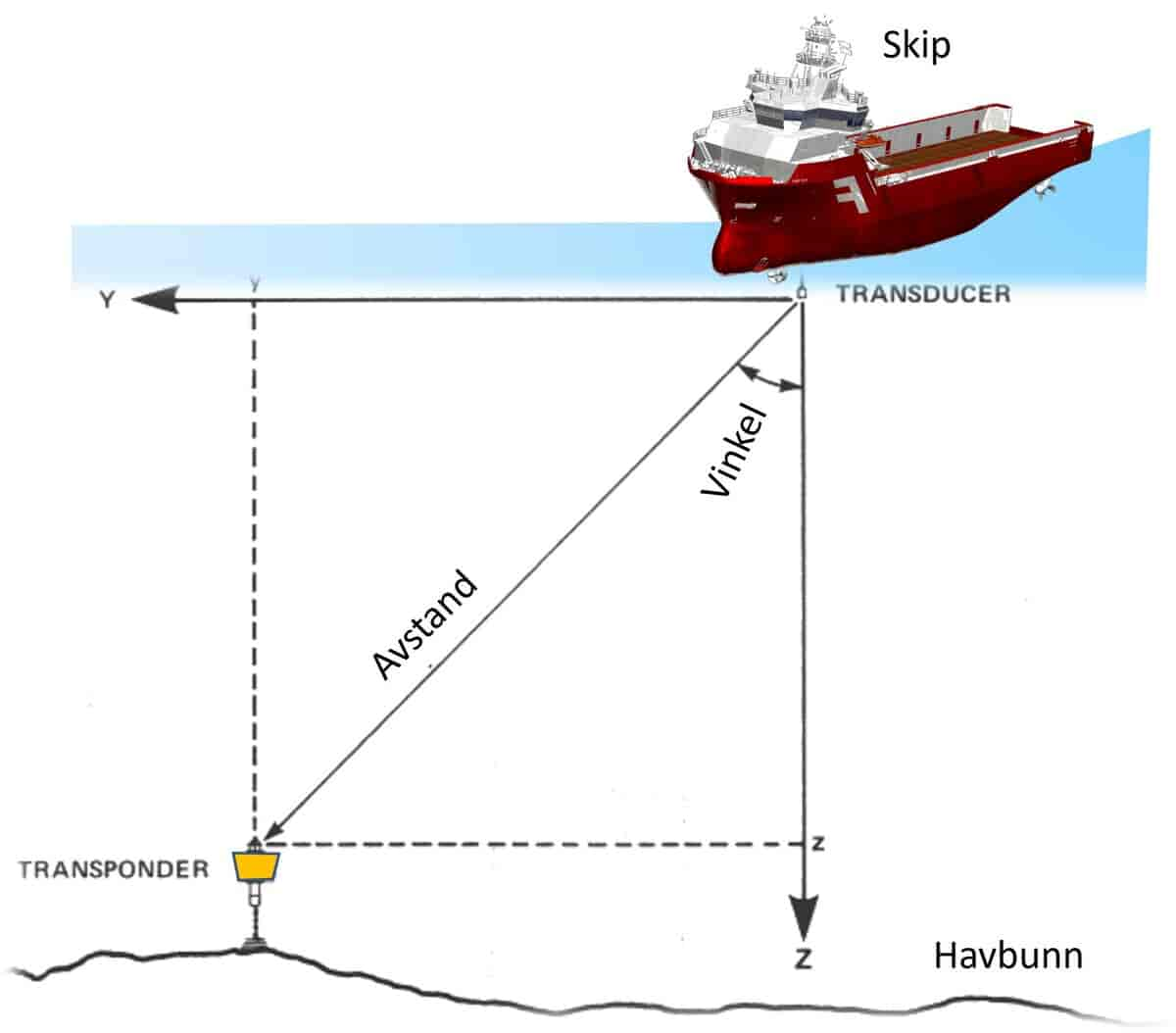
Eksempel på hvordan et HPR-system i SSBL-modus måler avstand og vinkel til en transponder som står i et kjent og fast punkt på havbunnen.
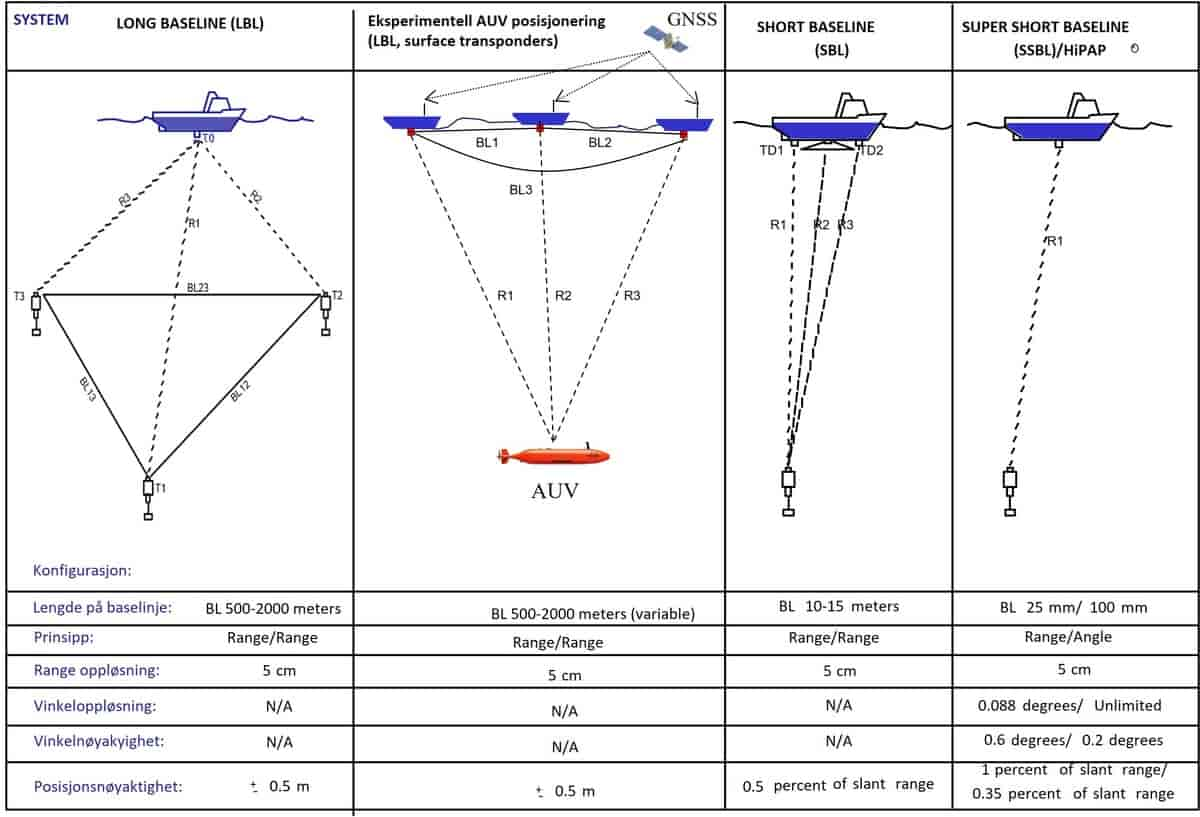
Eksempel på forskjellige måleprinsipper ved hydroakustisk posisjonering. Mest vanlig er SSBL og LBL.
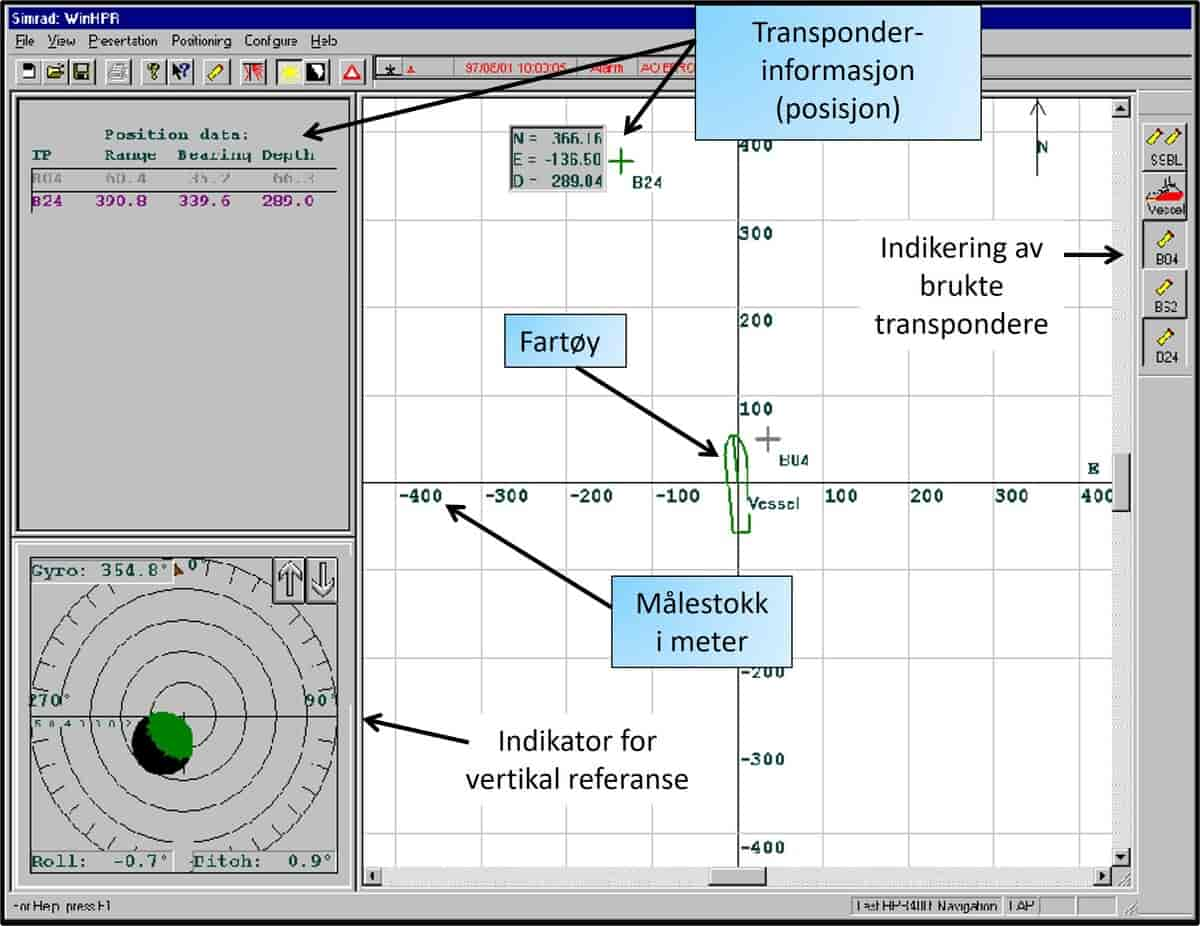
Typisk skjermbilde fra et HPR-system fra Kongsberg Maritime. I et geografisk gradnett vil man kunne se posisjon til transponderen, samt skipets egen posisjon i forhold til denne.
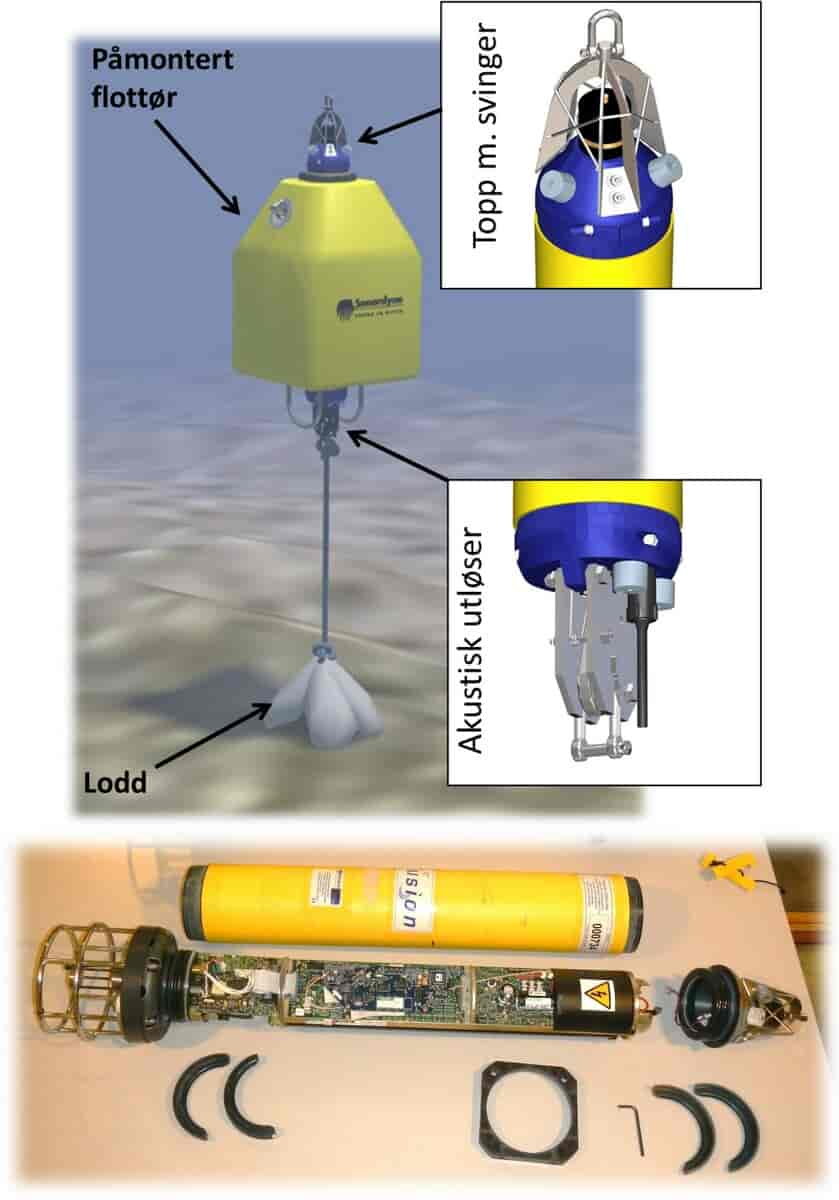
Eksempel på hvordan transponder kan være oppankret på havbunn. Under vises elektronikk og batterimodul dratt ut av det trykksikre røret. Eksempelet viser transponder fra det britiske selskapet Sonardyne.
Prinsipp og målemetoder
Avstand og peiling
For å beregne ens posisjon kreves nøyaktig måling av avstand og peiling til transponderen. Avstanden måles på tilnærmet samme metode som benyttes i ekkolodd. Senderen (transducer/svinger) på skipet sender ut en kort lydpuls («ping») i området 20–50 kHz. Når denne pulsen når transponderen, vil denne svare med en tilsvarende puls. Kjenner man så lydhastigheten i vann og eventuell forsinkelse i transponder, kan avstanden beregnes nøyaktig. Transducer virker som både sender og mottager. Rekkevidden for et vanlig HPR-system ligger typisk på 1000–4000 meter.
Vinkelmåling
Vinkelmålingen krever en gitt geometri mellom sender og transponder. Dette gjøres ved at man benytter to eller flere sendere på skipet, eller at man har flere transpondere på havbunnen. Avstanden mellom senderne eller transponderne kalles basislinjer (engelsk baseline).
Ved å kjenne avstanden mellom sendere eller transpondere kan vinkler beregnes ut fra forsinkelsen og faseforandringen i lydpulsen mellom enhetene som inngår. For å få rettvisende geografiske peilinger kreves normalt at systemet benytter informasjon fra gyrokompass.
Lengden på basislinjene er med på å kategorisere HPR-systemet og dets operasjonsmodus:
- SSBL (Super Short Baseline) er den vanligste metoden. Her dannes basislinjen av avstanden mellom to sender- og mottagerelementer i bunnutstyret på skipet. Avstanden kan typisk ligge omkring 10 cm. Ved måling av faseforskjellen på innkommende lydpuls mellom elementene vil peiling til transponder kunne beregnes. Enkelte produsenter kaller denne målemetoden for USBL (Ultra Short Baseline). Et mye utbredt produkt fra Kongsberg Maritime kalles HiPAP (High Precision Acoustic Positioning).
- SBL (Short Baseline) bygger på at man på skipet har to separate svingere – gjerne én i hver ende av skipet. Basislinjen kan dermed bli flere titalls meter. En slik løsning vil kunne gi god nøyaktighet på vinkelmåling, men på grunn av noe mer komplisert installasjon er den lite benyttet.
- LBL (Long Baseline) er basert på at man har flere transpondere i kjente posisjoner på havbunnen. Basislinjene er da gitt av avstanden mellom de forskjellige transponderne. Mottageren på skipet kan da i prinsippet kun trenge å måle avstanden til hver transponder og beregne posisjon ut fra dette – såkalt trilaterasjon.
Transponder
Transponderenhetene som er plassert på havbunnen, er innkapslet i et rør for å tåle høyt trykk. Strømforsyning besørges av et relativt stort batteri som gjør at systemet kan stå på havbunn i flere måneder. I tillegg til å sende lydpuls for posisjonering kan enkelte transpondere også sende annen informasjon som temperatur, helningsvinkel, trykk (dybde), samt annen teknisk statusinformasjon.
Transponeren hentes normalt til overflaten ved hjelp av fjernstyrt undervannsfarkost (ROV) eller ved at den har en fjernstyrt utløsermekanisme som frigjør den fra loddet som holder den til havbunnen.
Historikk og utvikling
HPR ble først og fremst utviklet som et posisjonsreferansesystem under offshore-operasjoner på 1960- og 1970-tallet, da som et nødvendig system under dynamisk posisjonering. Simrad i Horten (nå Kongsberg Maritime) fikk tidlig en posisjon som en av de verdensledende leverandørene av HPR-utstyr i offshore-markedet. I tillegg til å posisjonere skip benyttes teknologien også i stor utstrekning til å posisjonere konstruksjoner, kabler, rørledninger, dykkere og så videre under vann. Følgelig har utbyggingen av offshore olje- og gassindustri vært helt avhengig av bruk av HPR-utstyr.
Tradisjonelt har HPR-utstyr vært relativt kostbare installasjoner, men i de senere år har det utviklet seg et marked innen langt rimeligere forbrukerelektronikk. Ved å benytte høyere frekvenser og lavere effekt kan utstyret lages langt mer kompakt og billig, eksempelvis for å posisjonere undervannsdroner og fiskeredskaper på grunt vann. Disse høyfrekvente systemene vil normalt ha en rekkevidde på mindre enn 200 meter og en nøyaktighet som ikke måler seg med de kostbare offshore-systemene.
En eksperimentell metode for posisjonering av autonome undervannsfarkoster (AUV) bygger på bruk av flere transpondere i havoverflaten. Hver transponder kan da være posisjonert med GNSS, og AUVen kan da beregne posisjon tilnærmet likt det som er beskrevet under LBL ovenfor.
Les mer i Store norske leksikon
Litteratur
- Kjerstad, N., 2022. Elektroniske og akustiske navigasjonssystemer. Fagbokforlaget.

Kommentarer
Kommentarer til artikkelen blir synlig for alle. Ikke skriv inn sensitive opplysninger, for eksempel helseopplysninger. Fagansvarlig eller redaktør svarer når de kan. Det kan ta tid før du får svar.
Du må være logget inn for å kommentere.