
Gyrokompass er et navigasjonsinstrument som viser riktige geografiske himmelretninger uten noen form for magnetisk misvisning slik magnetkompassene gjør (se kompass). Gyrokompasset retter seg altså inn mot den geografiske nordpolen, og kan dermed vise «rettvisende» kurser under navigering, uten noen form for magnetisk påvirkning fra skipets eller Jordens magnetfelt. Det klassiske gyrokompasset er basert på et gyroskop som er modifisert slik at aksen retter seg mot nord etter hvert som det påvirkes av jordrotasjon. Aksen i gyroskopet er da i praksis aksen i en elektromotor.
gyrokompass
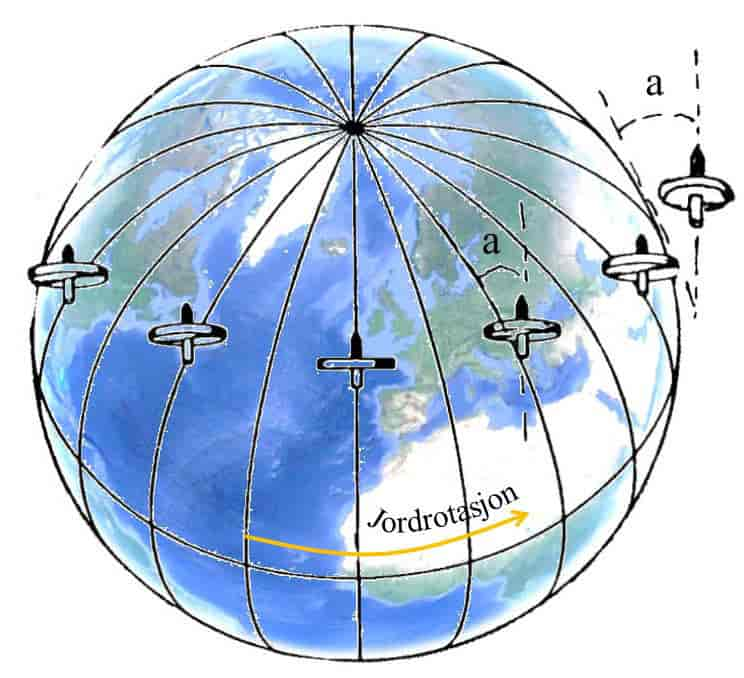
Et gyroskop med stort spinn vil forsøke å holde aksen mot et fast punkt på himmelkula, av og til kalt 'gyrostjerne'. Når jorden roterer vil følgelig aksen gradvis heves fra jordoverflaten (vinkel a øker). Denne effekten utnyttes i mekanismen som gjør gyroskopet til et meridiansøkende kompass.
Typer
Selv om de fleste gyrokompass er basert på forskjellige former for gyroskop finnes det også nå nyere former som avviker fra dette, men likevel oftest kalles gyrokompass. Vi skiller derfor mellom forskjellige former for gyrokompass, etter hvilke grunnleggende sensorteknologi som benyttes:
- mekaniske gyrokompass
- optiske gyrokompass
- «Solid State» gyrokompass
De mest avanserte variantene vil i tillegg til å måle kurs også kunne måle vinkelakselerasjon og vinkelhastighet i tre forskjellige akseretninger. Disse kan være anlegg som grenser opp mot det som normalt kalles treghetsnavigasjonssystemer (TNS).
Bruksområde
Gyrokompass er et av de viktigste navigasjonsinstrumentene på både skip og fly, og det stilles strenge krav til ytelse og nøyaktighet. I moderne navigasjonssystemer vil informasjon fra gyrokompass ofte være tilkoblet autopilot, elektroniske kartsystem (ECDIS), radar, antenner for satellittkommunikasjon og så videre. Også i undervannsfarkoster, våpensystemer, raketter og avanserte droner vil det være informasjon fra forskjellige varianter av gyrokompass. Gyroinformasjon kan da benyttes til både stabilisering og guiding. Den internasjonale maritime organisasjonen (IMO) stiller krav til at alle større skip skal være utstyrt med godkjent gyrokompass.
Mekanisk gyrokompass
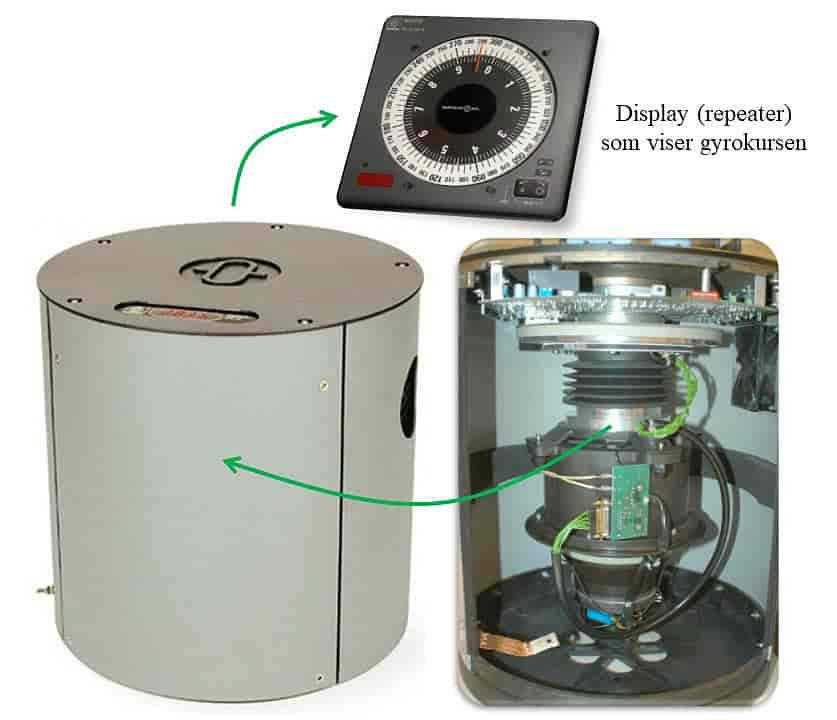
Moderne mekaniske gyrokompass er normalt plassert sentralt i skipet og kursinformasjon overføres til forskjellige display og instrumenter. Bak et deksel vil man kunne se inn på opphenget for sensoren - det følsomme elementet med gyroskop. Her fra et Anschutz St-22 kompass som er basert på gyroskop innkapslet i en kule som flyter fritt i en beholder (ytre kule). Her ser man beholderen henge i en dempet gummibelg.
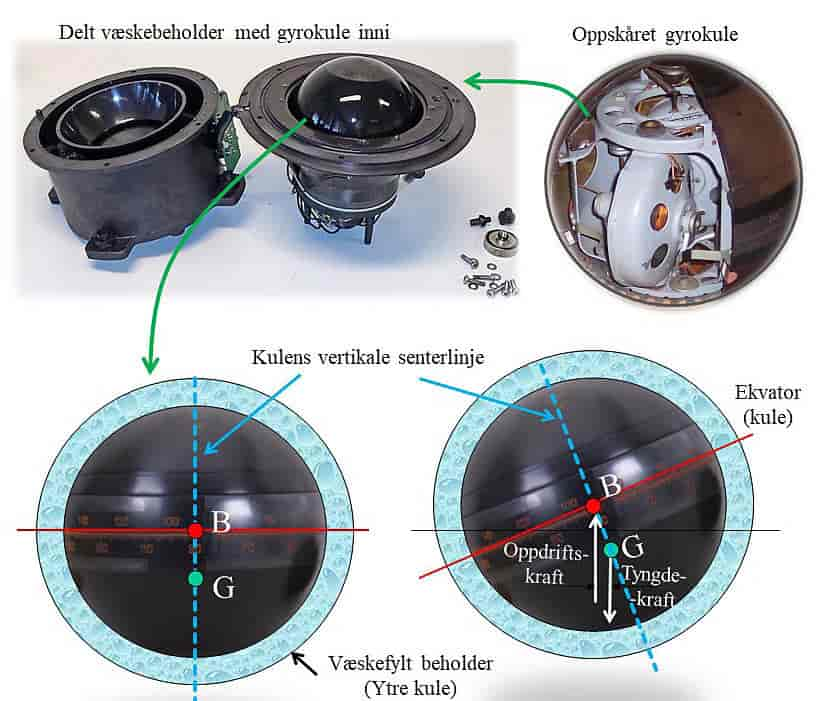
Den flytende gyrokulen på en Anschutz gyrokompass er konstruert slik at tyngdepunktet (G) ligger under oppdriftspunktet (B, senter av kule). Når gyroskopene inne i kula spinner vil disse bidra til at kulen tilter som følge av jordrotasjon. Dette medfører en asymmetri i kreftene som påvirker kula. Dette kan betraktes som om gyroaksen vil påføres en vertikal kraft som vil presesere aksen horisontalt mot meridianen. Gyromotorene får tilført energi trådløst gjennom væska kula flyter i. Hvis kula berører beholderen under drift vil det påføre gyrokompasset en feil.
Det mekaniske gyrokompasset er det klassiske gyrokompasset som finnes på de aller fleste skip. Konstruksjon kan betraktes som tre deler: Det følsomme element, etterdreiningssystemet og strømforsyningen.
Det følsomme elementet består av ett eller flere gyroskoper. Hvert gyroskop er egentlig elektromotorer som roterer med svært stor hastighet – ofte omkring 20 000 omdreininger i minuttet. Rotoren i motoren vil da virke som et gyroskop. Funksjonen til det følsomme element er at det hele tiden skal være rettet mot den geografiske nordpolen, og dermed kunne vise geografisk riktig kurs («rettvisende kurs»).
Det følsomme element med gyroskop er opphengt slik at det kan rotere om både den horisontale og vertikale aksen. I utgangspunktet vil gyroskopet på grunn av sitt spinn og store treghet forsøke å holde aksen mot et fast punkt i verdensrommet. Tenker man seg at aksen står horisontalt i øst/vest-retning ved oppstart vil aksen dermed heves 15 grader per time som følge av jordrotasjon, hvis man brukte et umodifisert gyroskop. For å gjøre gyroskopet til kompass må man derfor gjøre det meridiansøkende. Forskjellige produsenter har sine egne måter å gjøre dette på, men felles er at aksen påføres en tyngdekraft drevet vertikal kraft etter hvert som aksen heves av jordrotasjon. En slik kraft vil medføre et horisontal dreining (presesjon) av gyroskopet om den vertikale aksen mot meridianen (nord). På grunn av systemets treghet vil denne bevegelsen fortsette forbi meridianen, og må følgelig dempes ved hjelp av å tilføre en ny kraft. I praksis vil dette kunne være en liten vekt som er plassert usymmetrisk i forhold til gyroaksen.
Etter meridiansøkning og demping er gyroskopet modifisert til å bli et kompass der aksen alltid peker mot nord. Hele prosessen fra gyroaksen begynner å søke mot nord til den er stabil vil ta noe tid, avhengig av systemets konstruksjon og treghet. Vanlig dempet svingeperide er omkring 100 minutter, og det kreves minst to slike perioder før kompasset viser kursen med tilstrekkelig nøyaktighet, altså vel tre timer. I de fleste gyrokompass er gyroskopene montert inne i en kule («gyrokule») som flyter svært stabilt inne i en væskebeholder. Gyromotorene får da tilført strøm gjennom væska, samt at signal til etterdreiningssystem vil være gitt av posisjon til gyrokula i forhold til den ytre beholderen. I noen eldre gyrokompass (Sperry) var det følsomme element opphengt i en tynn wire i et gimbal-/kardangsystem, og det ble benyttet kvikksølv for å påføre gyroaksen en meridiansøkende kraft.
Etterdreiningssystemet skal besørge at det følsomme elementet ikke dreies når selve kompasshuset dreies, som følge av skipets kursforandringer. Elektromotorer dreier derfor enheten med det følsomme element synkront med kursforandringen. Systemet vil også registrere vinkelen mellom det følsomme element og kompasshuset, noe som da vil representere skipets aktuelle kurs. Informasjon om denne kursen vil da bli distribuert til forskjellige former for display og andre enheter som krever kursinformasjon.
Optisk gyrokompass
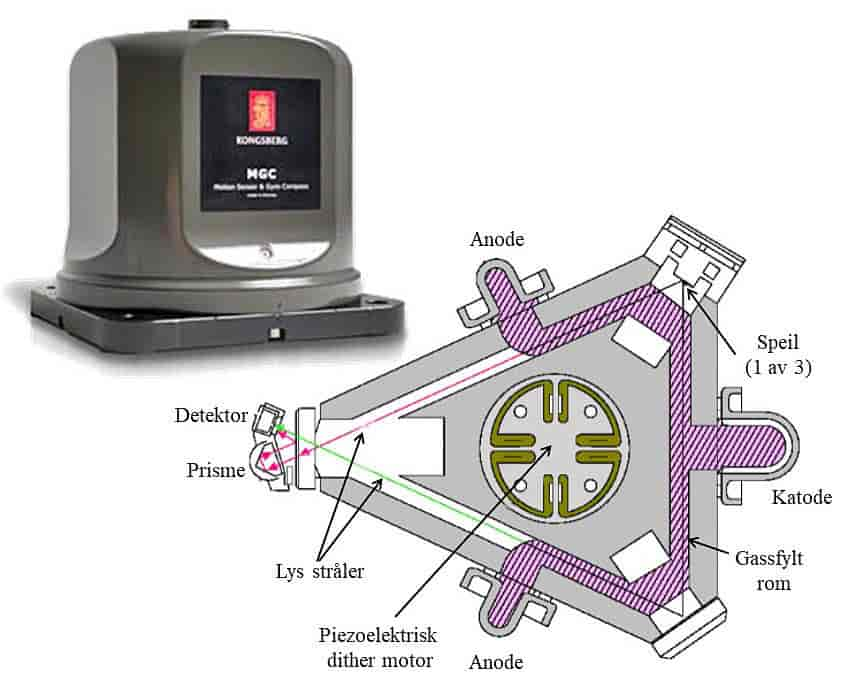
To pulser av laserlys som sendes i motsatte retninger i et fastlagt mønster av speil (eller fiberoptisk ring) vil kunne benyttes som sensor i optiske gyrokompass. Ved å registrere en ørliten tidsforskjell mellom deteksjon av de to pulsene vil man kunne avlede vinkelakselrasjon, vinkelhastighet og kurs. I optiske kompass vil det normalt være montert tre slike systemer i en tre-akset referanseramme. Innfelt er vist en RLG gyro fra Kongsberg.
I optiske kompass er det ingen bevegelige deler slik som i mekaniske gyrokompass, og man kan derfor stille spørsmål om dette i det hele tatt burde kalles gyrokompass. Utgangspunktet for optiske kompass er at man sender laserlys i et nøye avstemt mønster, eller gjennom en ringformet spole av fiber som leder lys. Den første typen kalles gjerne speillaser- eller ringlasergyro (RLG), men den andre kalles fiberoptisk gyro (FOG). Grunnleggende virkemåte for begge er at en lyspuls sendes inn i fibret eller speilkammeret i to forskjellige retninger. Hvis spolen står i ro vil begge lyspulsene komme samtidig frem til utgangspunktet. Beveges spolene vil den lyspulsen som går med bevegelsen bruke litt lengre tid en den pulsen som går mot bevegelsen. Denne lille tidsforskjellen vil være direkte korrelert til vinkelhastigheten sensoren utsettes for. Fenomenet som utnyttes i selve detektoren for å registrere tids-/faseforskjellen kalles Sagnac-effekten.
Alle de optiske kompassene vil ha tre lysmønster som definerer et tre-akset referansesystem, hvor vinkelhastigheter da måles med stor nøyaktighet om alle aksene. Ved oppstartet etableres et virtuelt plan hvor bevegelse av fartøy, samt jordrotasjon vil beregnes ut fra. En pålitelig nord-referanse vil gradvis kunne beregnes ettersom jorden roterer, en prosess som typisk vil ta fem–ti minutter, mens full nøyaktighet typisk oppnås etter 15–30 minutter. På grunn av sin tre-aksede sensorstruktur vil disse enhetene ofte også kunne beregne bevegelse i og om alle akseretningene og derfor på et skip gi data om rulle-, stampe- og heave-bevegelse. De mest avanserte og kostbare systemene kan også virke som treghetsnavigasjonsystemer (TNS). For å optimalisere ytelse vil kompasset oftest være tilkoblet GNSS-mottager for dermed å bli tilført informasjon om posisjon (breddegrad) og hastighet.
«Solid State» gyrokompass
Solid State-begrepet betyr på at det ikke er bevegelige deler i kompasset, slik tilfelle er med de mekaniske gyrokompassene. I likhet med de optiske kompassene beregner denne kategorien kompass nord-referansen etter samme matematiske prosess. Forskjellen er at man ikke benytter optikk i selve sensordelen, der vinkelhastigheten beregnes. Den vanligste sensoren vil være basert på et piezoelektrisk element som er påført en vekselspenning. Elementet vil da svinge med en konstant frekvens. Av denne grunn kalles kompasset av og til for vibrasjonsgyro eller Coriolisgyro.
Utsettes elementet for en vinkelakselerasjon vil dette påføre svingningen en forandring som kan registreres og korreleres til vinkelakselerasjon og hastighet. Den videre prosessen for å vise nord-referanse vil da være som i de optiske kompassene. Det piezoelektriske elementet kan være utformet som en liten halvkule, og kompasset kan derfor være kalt Hemispherical Resonator Gyroscope (HRG). Utgangsdata vil normalt være som i de optiske kompassene og innstillingstiden typisk mindre enn én time.
Gyrofeil
Gyrokompass er vesentlig mer nøyaktige enn magnetkompass, men likevel vil alle mekaniske gyrokompass være beheftet med en feil som er avhengig av skipets fart, kurs og breddegrad. Feilen kan på moderne kompass kompenseres for ved at kompasset tilkobles GNSS for bredde- og fartsinformasjon. Alternativt kan man benytte korreksjonstabeller eller beregne feilen (i grader) med denne formelen:
- Gyrofeil = (57.3 v cosk ) / (901 cosλ + v sink)
Der hastighet (v, i knop), breddegrad (λ) og kursen (k, i grader) inngår. Fra formelen ser vi at feilen vil øke kraftig på høye bredder, og kompasset vil i praksis bli svært ustabil når man nærmer seg 80 grader (nord eller syd). Erfaringer fra seilaser til Nordpolen med isbryter har vist at gyrokompasset slutter helt å virke omkring 84 grader nord. Fra formelen ser man også at feilen øker på nordlige og sydlige kurser. Dette på grunn av seilas langs meridianen vil medføre en viss heving av gyroskopets akse, på lik linje som påvirkningen fra jordrotasjon. I sin tur vil dette påvirke mekanismen som gjør gyroskopet meridiansøkende, og følgelig bidra til en hastighets- og kursavhengig feilvisning. På grunn av en betydelig komponent fra hastigheten ser vi at denne type kompass ikke vil være egnet i fly.
Nøyaktighetene på optiske- og Solid State-gyrokompass er oftest oppgitt med en faktor som divideres med cosinus til breddegraden. Følgelig vil nøyaktigheten her også avta med økende breddegrad. På 60 grader nord vil typisk nøyaktigheten på et HRG-kompass være 0,25 / cos60 = 0,5 grader. På 80 grader nord øker usikkerheten på det gitte kompasset til 1,44 grader.
På grunn av breddefeil på gyrokompass skal skip som ferdes nord om 80 grader nord i henhold til Polarkoden fra IMO ha kompass som er basert på signaler fra GNSS-systemene (satellittkompass). Nøyaktigheten til satellittkompass påvirkes ikke av breddegraden eller hastigheten til skipet.
Historie
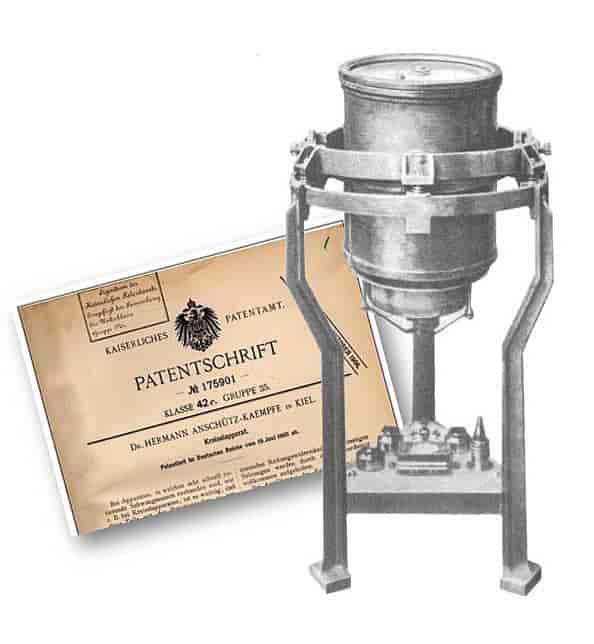
Dette gyrokompasset fra tyske Anschutz var det første brukbare gyrokompass for skip, og det ble patentert i 1907.
Det moderne gyrokompassets stammer fra Tyskland. Etter blant annet å ha deltatt på flere polarekspedisjoner startet Hermann Anschutz-Kaempfe (1872–1931) utviklingen av en nytt type kompass – gyrokompasset. Anschutz hadde blant annet ambisjoner om å seile under polisen, men innså at det tradisjonelle magnetkompasset ikke kunne benyttes på grunn av stor misvisning og dårlig innstillingsevne. Under et foredrag i 1902 la Anschutz frem sine tanker om å lage et gyrokompass.
Gyroskopets egenskaper var på dette tidspunkt velkjent, og den franske fysikeren Leon Foucault (1819–1868) hadde også vært inne på å lage et nordsøkende gyroskop allerede omkring 1850. Foucault hadde blant annet blitt kjent for at han hadde demonstrert jordens rotasjon ved hjelp av gyroskopet. Problemene med friksjonskrefter ved stabilisering gjorde at den engelske Lord Kelvin lanserte en idé om å la gyrosystemet flyte i en væske. Det første elektrisk drevne gyroskop ble utviklet i 1890 av G. M. Hopkins.
Forsøkene til de franske og engelske vitenskapsmennene var kjent for Anschutz da han sammen med optikermester Keicher bygget en prototyp. I 1904 fattet den tyske marinen interesse for arbeidene, og på dette grunnlaget kunne Anschutz i 1905 starte opp sin egen bedrift. Hans fetter, diplomingeniør Max Schuler, kom snart inn i selskapet og fikk en viktig rolle for utviklingen av det første gyrokompasset. Dette kom i 1907 og bestod av et gyroskop som var opplagret flytende i en kvikksølvbeholder. En av Anschutz' beste venner var vitenskapsmannen Albert Einstein (1879–1955), og det er kjent at Einstein bidro med flere praktiske råd og løsninger i forbindelse med konstruksjon av Anschutz-kompasset.
Oppfinnelsen var en revolusjon innen maritim navigasjon – man kunne nå bestemme rettvisende kurs med en nøyaktighet ned mot én grad. I 1912 ble det introdusert modeller som benyttet flere gyroskoper som var sammenkoblet, og i 1925 var modellen så modifisert at det er kun minimal prinsipiell forskjell på de kompassene vi benytter i dag.
I USA var ingeniøren Elmer Ambrose Sperry den store pioneren. Han søkte i 1908 patent på den første ballistiske gyrokompass, og i 1910 startet han bedriften Sperry Gyroscope Company. Av de første produktene var kunstige horisonter og kompass for fly. Gyrokompasset var basert på et gyroskop uten flytende opplagring. De første modellene ble i 1911 testet både på passasjerskip og marinefartøy. I 1913 ble det etablert en egen avdeling i England, hvor S.G. Brow på samme tid jobbet med sin egen konstruksjon. Han lanserte i 1916 et kompass med et to kilogram gyrohjul som roterte med 14 000 omdreininger per minutt, og hvor det følsomme element hvilte på en pulserende oljepute.
Ved starten av 1960-tallet var man i forskningsmiljøene i USA opptatt av å se på mulighetene for å kunne registrere vinkelakselerasjon ved hjelp av laserlys. Det første systemet ble bygget av Sperry i 1962, to år etter at Bell Laboratories hadde demonstrert den første helium-neon-laseren. Det første anlegget bestod av et kvadratisk arrangement med sider på én meter. I hvert hjørne var det plassert speil slik at lyset kunne reflekteres, og dermed skape en lysbane gitt av kvadratet. Med denne prototypen var man i stand til å måle jordens rotasjon. Etter mange år med forsking kunne man tidlig på 1980-tallet kjøpe laserbaserte kompass for sivilt bruk, og de ble montert som standard i Boeing og Airbus' store passasjerfly. Fortrinnet fremfor de konvensjonelle mekaniske gyrokompassene var at de ikke var følsomme for store g-belastninger. De fikk derfor raskt utbredelse i fly.
Utover i 1990-årene utviklet flere selskaper, inkludert Sperry og Anschutz, kompass basert på optiske eller piezoelektriske prinsipper, og disse har gradvis fått større innpass hvor det kreves høy presisjon på kurs- og vinkelinformasjon. Kompass basert på radiosignal fra satellitter har også fått stort innpass på skip – da oftest som tillegg til de konvensjonelle gyrokompasstypene.
Les mer i Store norske leksikon
Litteratur
- Kjerstad, Norvald (2022). Elektroniske og akustiske navigasjonssystemer. Fagbokforlaget

Kommentarer
Kommentarer til artikkelen blir synlig for alle. Ikke skriv inn sensitive opplysninger, for eksempel helseopplysninger. Fagansvarlig eller redaktør svarer når de kan. Det kan ta tid før du får svar.
Du må være logget inn for å kommentere.