Det var den amerikanske ingeniøren William J. O'Brien som i 1936 først lanserte ideen til systemet. Etter å ha mislykkes med å overbevise luftforsvaret om mulighetene, ble arbeidet videreført av en teknikere i britiske Decca Records, senere Decca Navigator Co. Ltd. I forkanten av D-dagen ble det i hemmelighet bygget en Decca-kjede på sydkysten av England for å sikre navigering under minerydding og landgangen i Normandie, sommeren 1944. Systemet viste seg å være svært nøyaktig, og etter andre verdenskrig ble det utbygget Decca-kjeder i de fleste områder med omfattende skipsfart, og på det meste var over 50 kjeder i drift verden over.
Decca hadde kontroll over både utbygging av kjeder og utvikling av mottagerutstyr, og finansieringen var basert på utleie av mottagere og navigasjonstjenester, samt statlig støtte for etablering av nødvendig infrastruktur. I flere land var det lisensavtaler for drift og bygging av mottagerutstyr, og Norge hadde Kongsberg Våpenfabrikk en slik rolle. På det meste hadde cirka 30 000 båter og cirka 8000 fly installert Decca-mottager.
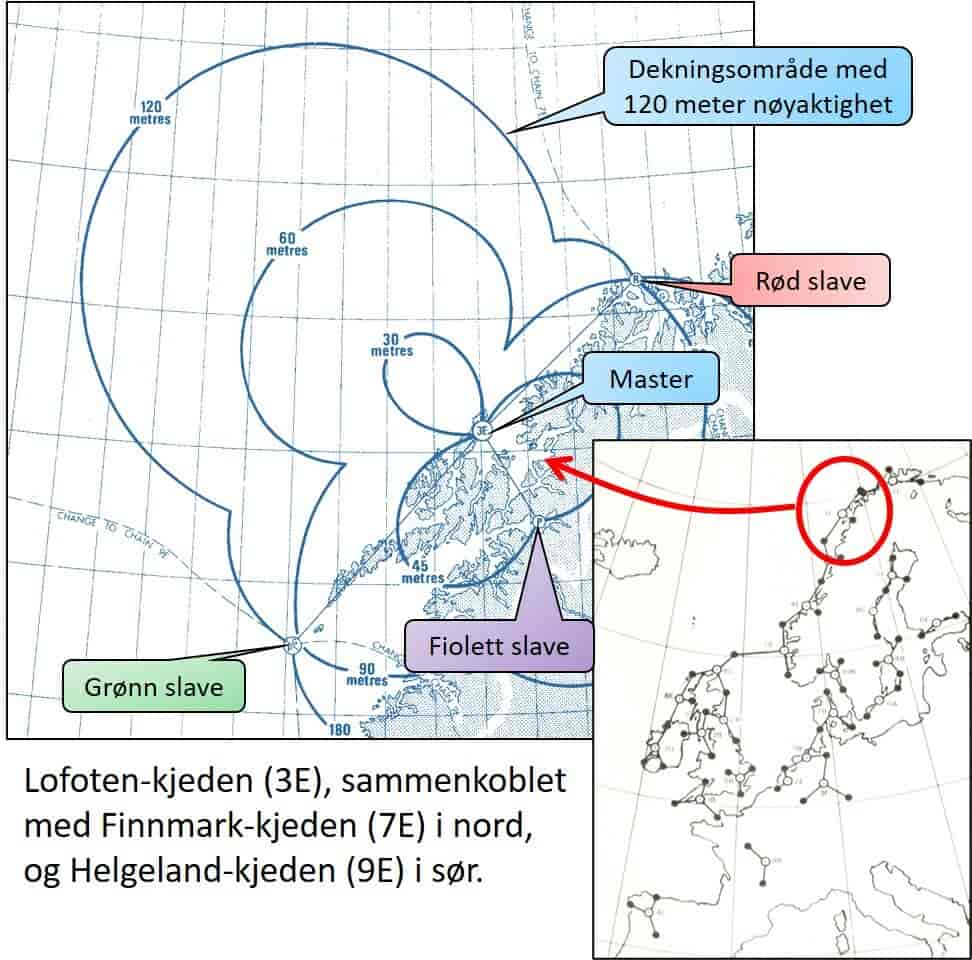
Utbyggingen i Norge startet i 1965, og i 1968 var seks kjeder i drift, og dekket hele norskekysten. Systemet ble svært populært i den norske fiskeflåten, og i løpet av 1970-tallet fikk nesten alle større fiskefartøy installert Decca-mottager, gjerne i tillegg til Loran-C.
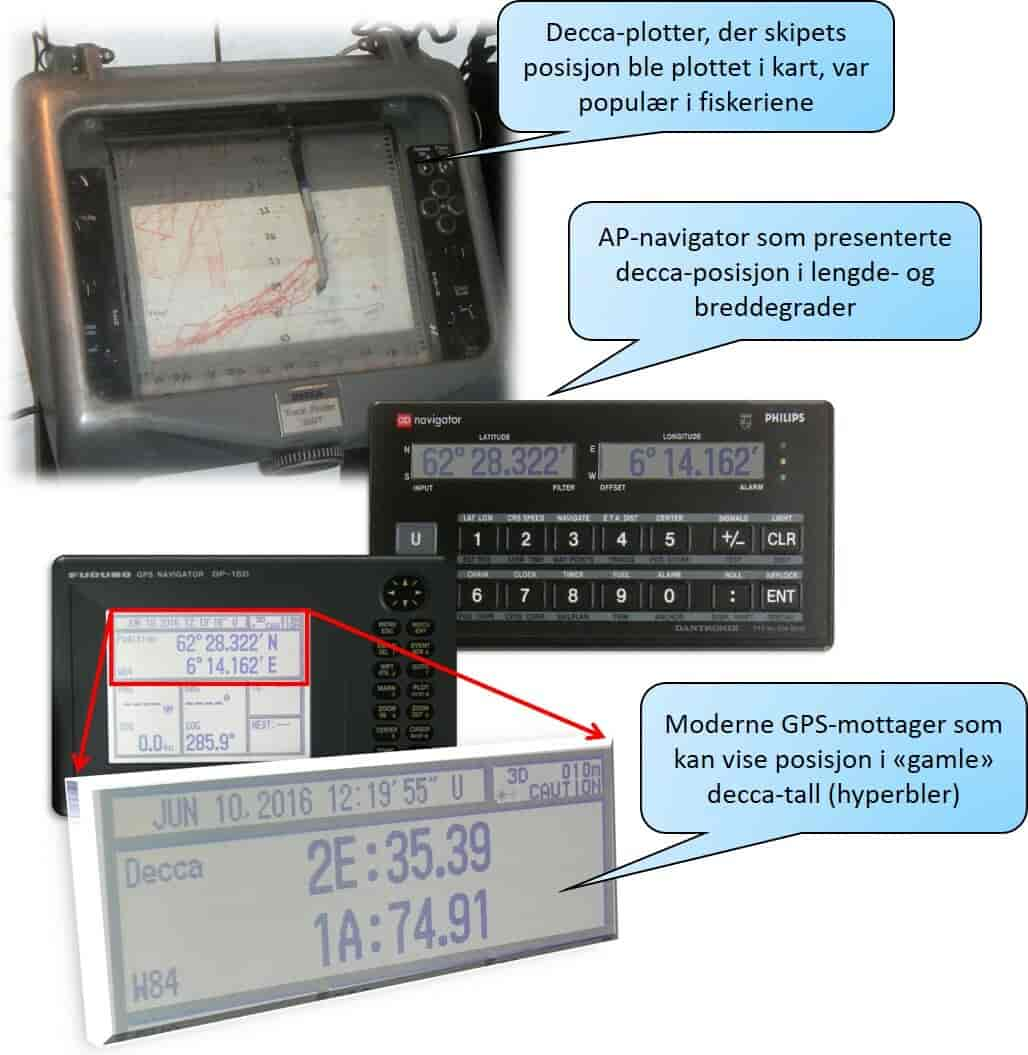
I 1980 ble Decca oppkjøpt av Racal Ltd., og litt senere gikk patentrettighetene ut. Dette medførte at andre selskap kunne bygge mottagere og fritt benytte signalene. Spesielt fikk Aktieselskabet Dansk Philips suksess med sin mottaker, som ble allment kjent som AP-navigator. Denne mottageren kunne dessuten presentere posisjon direkte i lengde- og breddegrad, og ikke bare i deccatall, slik det tradisjonelle mottagerne.
Etter hvert som GPS ble introdusert med gratis, og mer nøyaktig tjeneste, ble gradvis Decca-systemet mindre brukt. Som en følge av Loran C-etableringen ble de norske Decca-stasjonene nedlagt 1. januar 1997. Den siste kjeden som ble nedlagt var en japansk kjede i 2001.


Kommentarer
Kommentarer til artikkelen blir synlig for alle. Ikke skriv inn sensitive opplysninger, for eksempel helseopplysninger. Fagansvarlig eller redaktør svarer når de kan. Det kan ta tid før du får svar.
Du må være logget inn for å kommentere.