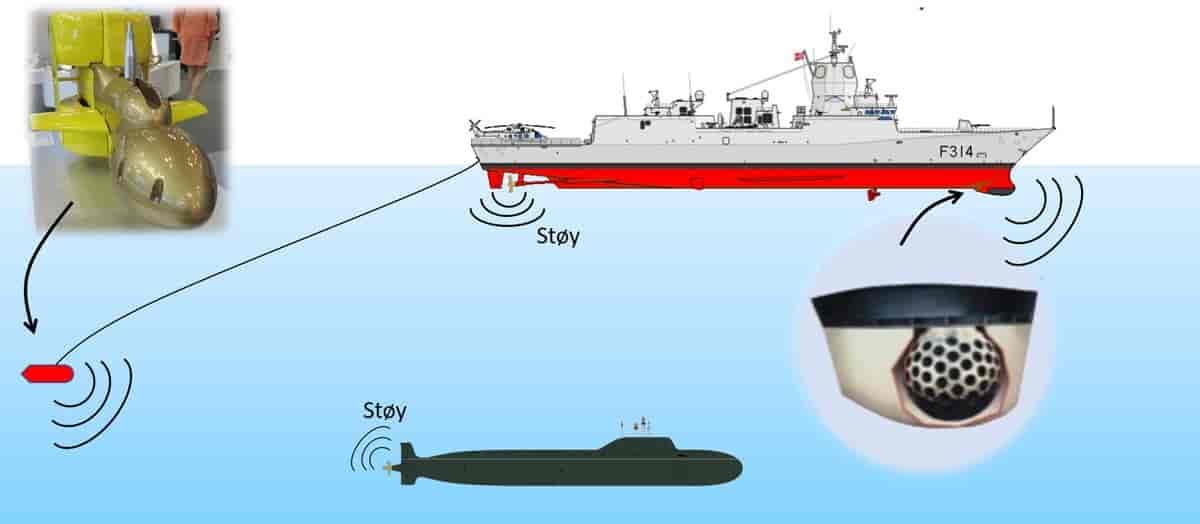
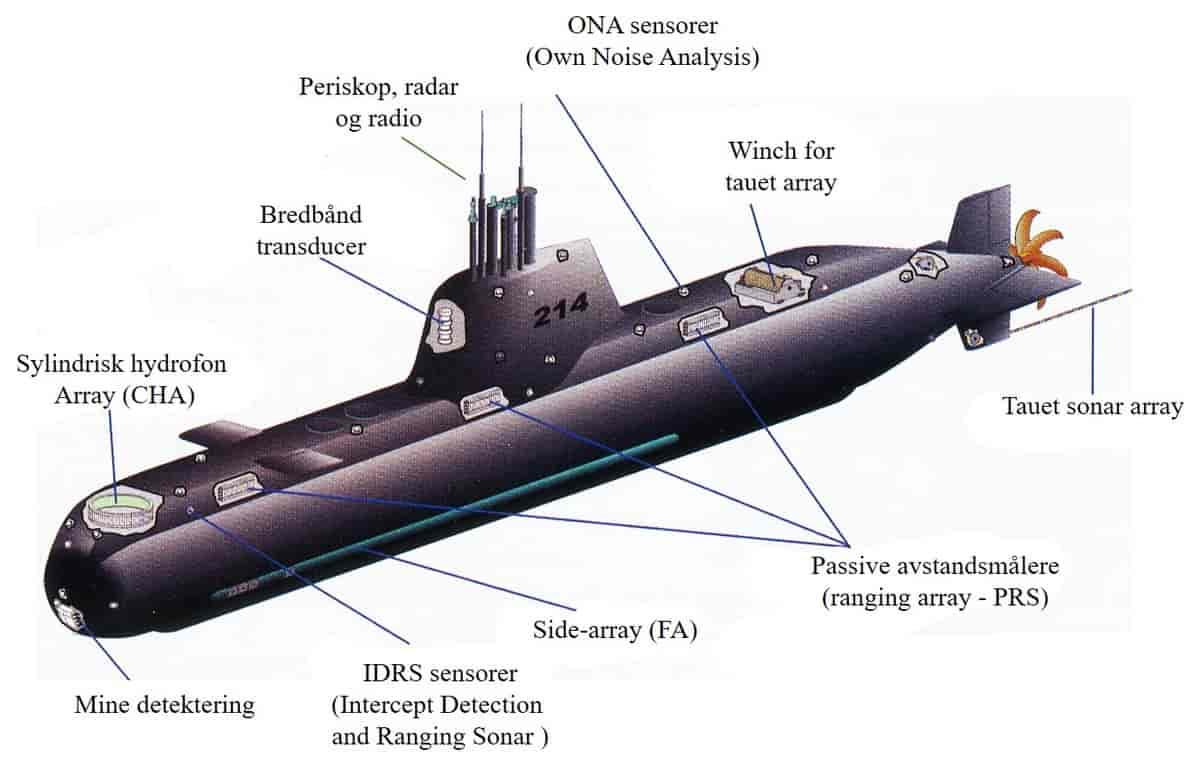
Aktive sonarer anvender en svinger (transducer) under skipet. Denne sender ut og mottar lydsignaler. En svinger vil normalt være oppbygget av en mengde små piezoelektriske elementer som kan styres elektronisk i mange forskjellige retninger uten at svingeren fysisk beveges. Slik kan objekter detekteres i alle retninger under skipet, eller i en spesifisert sektor. Fra svingeren sendes det ut korte og regelmessige lydpulser («ping») som reflekteres tilbake fra objekter og havbunnen. Avstanden kan da bestemmes etter ekkoprinsippet ved at man kjenner lydens hastighet i vann (rundt 1500 m/s).
Lydpulsens lengde, intervall, frekvens og modulasjon avgjør egenskapene og rekkevidden på sonaren og hvor detaljert bilde som kan tegnes av omgivelsene under vann. Med lave frekvenser, i området noen få kHz og opp til 20–30 kHz, vil man kunne detektere store fiskestimer eller ubåter på flere kilometers avstand. Høyere frekvenser på omkring 100–200 kHz benyttes på kortere avstander for mer detaljert gjengivelse innen noen få hundre meter.
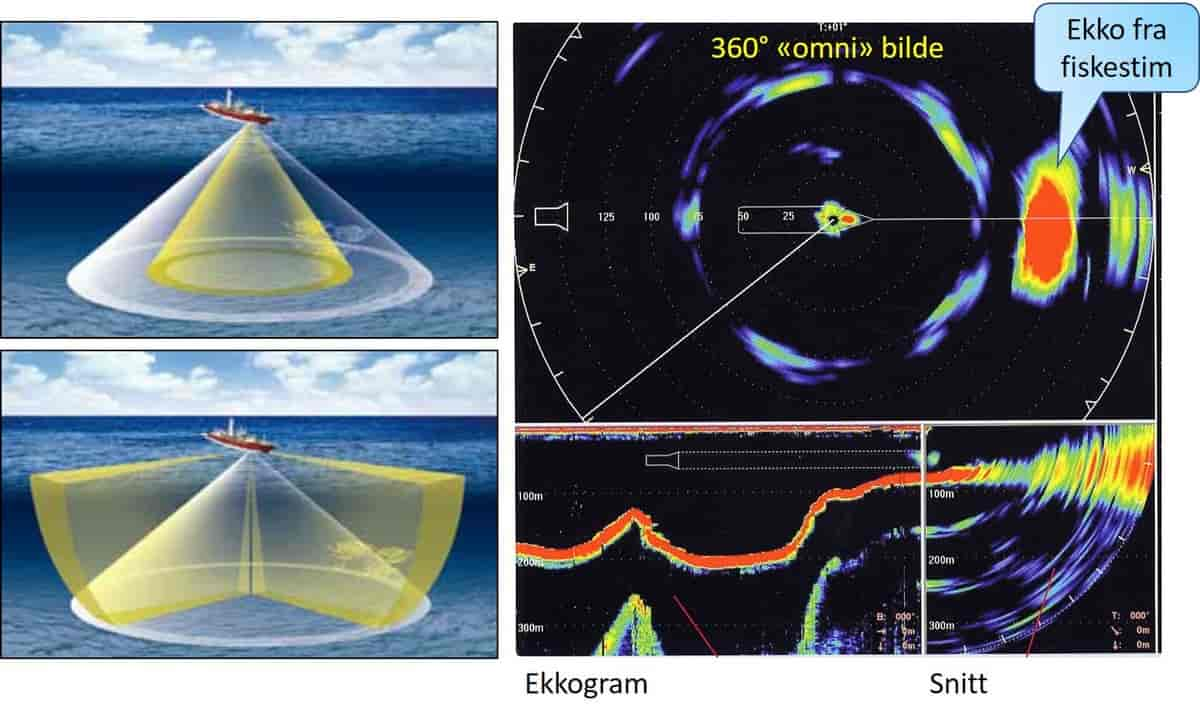
Omgivelsene under vann blir på moderne sonarer vanligvis presentert på en skjerm hvor man kan se 360 grader rundt skipet (omni-sonar), eller i valgte snitt eller sektorer – noen vil også kunne presentere et tredimensjonalt bilde.
Tidligere var det vanlig med mekanisk styring av svingeren og fysisk lytte til den mottatte lyden, og erfarne operatører kunne vurdere både fart og størrelse på målene ut fra karakteristikken på lyden. På moderne sonarer er denne teknikken erstattet med avansert signalbehandling som kombinerer tids- og avstandsmålinger med hastighetsmåling basert på frekvensvariasjoner (dopplereffekt).
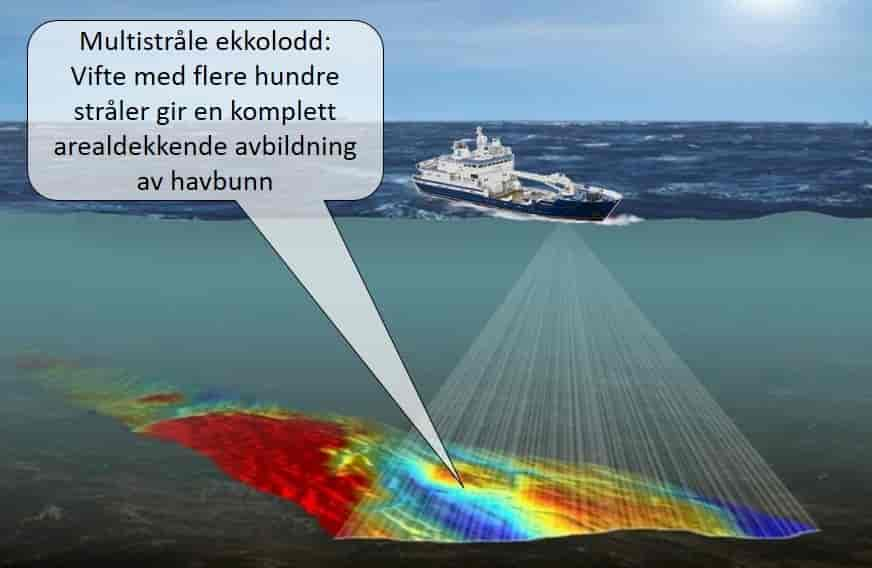
En spesiell variant av sonaren er multistråle-ekkoloddet, som benyttes i kartlegging av havbunn (batymetri). Dette instrumenter sender en «vifte» av lyd rett ned under båten. For kartlegging og observasjon kan det også benyttes spesielle sidesøkende sonarer (side-scan sonar) som kan være montert i fjernstyrte undervannsfarkoster (AUV og ROV). Enkelte slike system har en imponerende oppløsning og vil kunne presentere svært detaljerte «bilder» fra havbunn – eksempelvis skipsvrak. En annen variant er systemer som måler retning (peiling) og avstand til transpondere («akustiske fyr») på havbunn eller på miniubåter. Dette kalles hydroakustisk posisjonering (HPR) og anvendes i stor grad på offshorefartøy.



Kommentarer
Kommentarer til artikkelen blir synlig for alle. Ikke skriv inn sensitive opplysninger, for eksempel helseopplysninger. Fagansvarlig eller redaktør svarer når de kan. Det kan ta tid før du får svar.
Du må være logget inn for å kommentere.