Allerede i 1860-årene la britiske James Maxwell (1831–1879) og noe senere tyske Heinrich Hertz (1857–1894) frem teorier og bevis for at elektromagnetiske bølger, i likhet med lys, ble reflektert fra nærliggende objekter. Tyskeren Christian Hülsmeyer (1881–1957) gjorde i 1903 de første vellykkede eksperimentene med CW-radar. I 1925 foretok amerikanerne Gregory Breit (1899–1981) og Merle Tuve (1901–1982) målinger av ionosfærens høyde med en pulsradar. På 1930-tallet ble radarer videreutviklet for militær bruk, til dels i hemmelighet, forskjellige steder.
I Storbritannia demonstrerte Robert Watson-Watt i 1935 den første britiske radarstasjonen for flyvarsling. Året etter ble et lignende anlegg fullført i USA under ledelse av Colonel Corput og Paul Watson (ikke identisk med Watson-Watt). I 1937 ble radarkjeden Chain Home, som kom til å spille en viktig rolle i slaget om Storbritannia under andre verdenskrig, tatt i bruk.
Det første kommersielle radarsystemet ble installert på det franske passasjerskipet Normandie i 1936 (utskiftet og forbedret i 1939). I 1934 startet det tyske firmaet GEMA produksjon av en CW-radar med magnetron fra Phillips i Holland. Ved hjelp av pulsmodulasjon klarte man da å detektere et skip på tolv kilometers avstand.
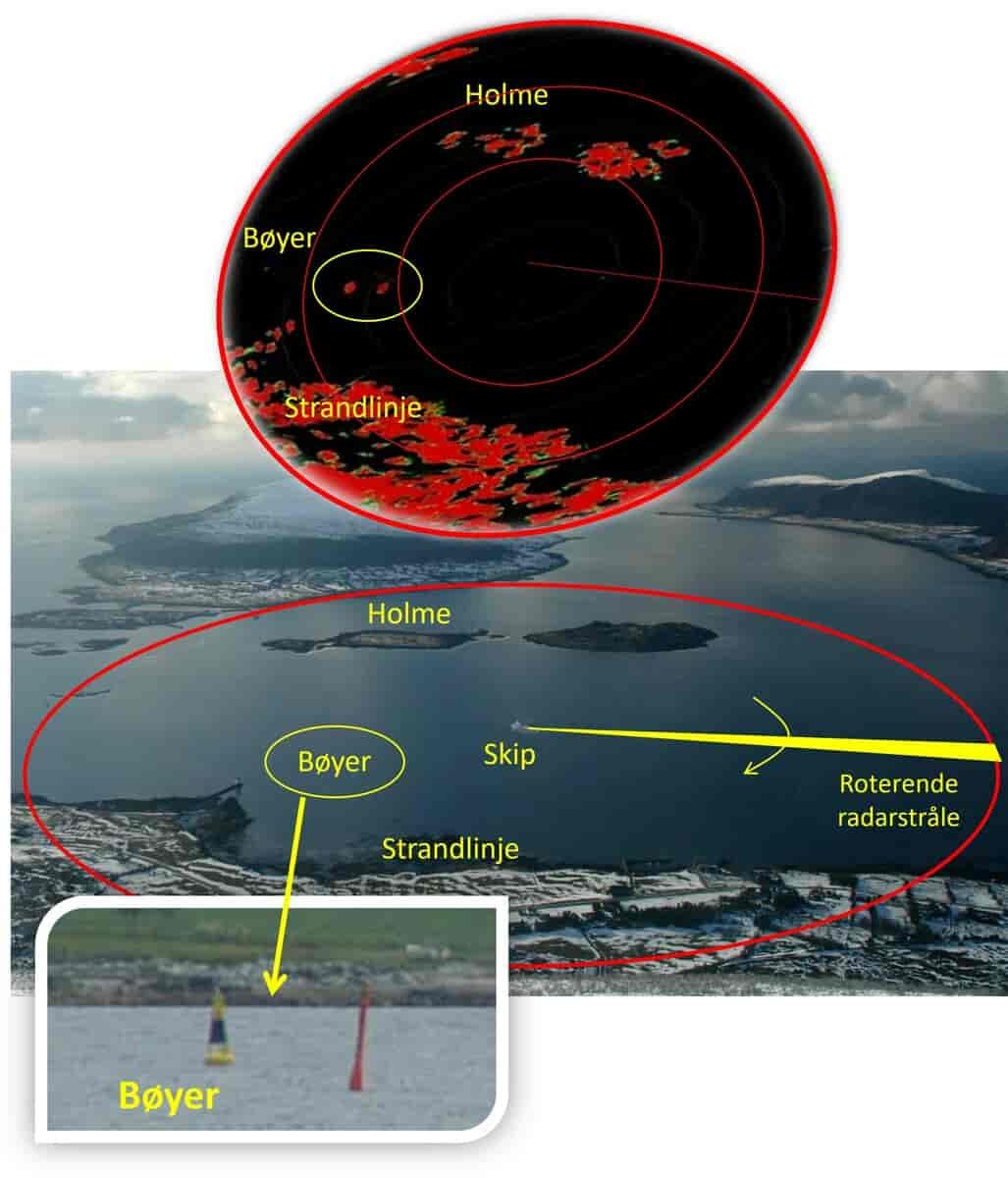
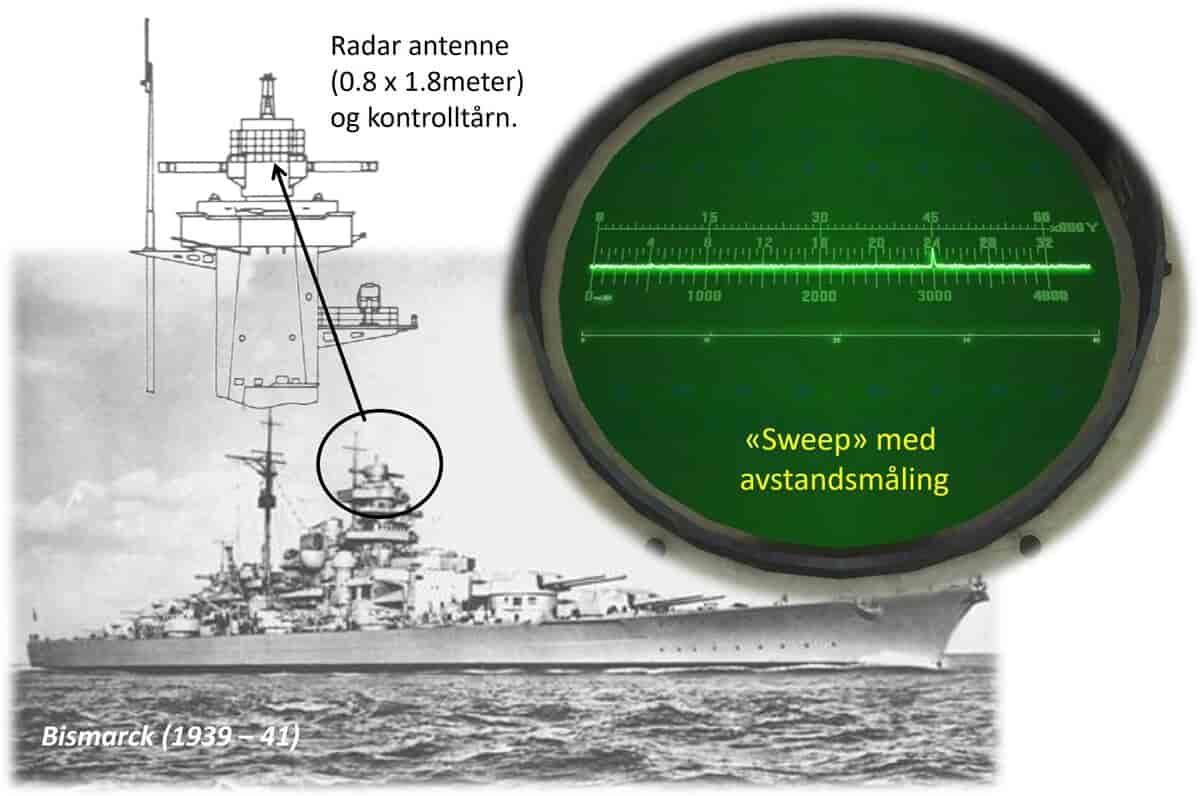
Utover i andre verdenskrig fikk flere krigsskip og fly installert radar. De første systemene hadde ikke roterende antenne, slik at man enten måtte dreie antennen mekanisk eller svinge skipet for å avsøke i flere retninger. Presentasjon var da en ren avstandsmåling på et katodestrålerør. I Norge ble flere store radaranlegg montert på land av den tyske okkupasjonsmakten for å detektere fly utenfor kysten. I England hadde man i 1943 en videreutviklet radar med roterende antenne og presentasjon på et modifisert katodestrålerør – Polar Plan Indikator (PPI). Den første av disse ble utplassert på HMS Saltburn i april 1943. To år senere hadde Tyskland tilsvarende teknologi klar for sine ubåter og overflatefartøy. Det norske handelsskipet Torrence fikk i 1943 installert radar av amerikanerne i forbindelse med at skipet gikk i troppetransport.
Det første sivile radaranlegget i Norge ble installert om bord på hurtigruteskipet Sigurd Jarl i 1945. Prinsippene for radar ble for første gang publisert i en historisk artikkel av den engelske fysikeren Reginald L. Smith-Rose (1894–1990) i februar 1945.
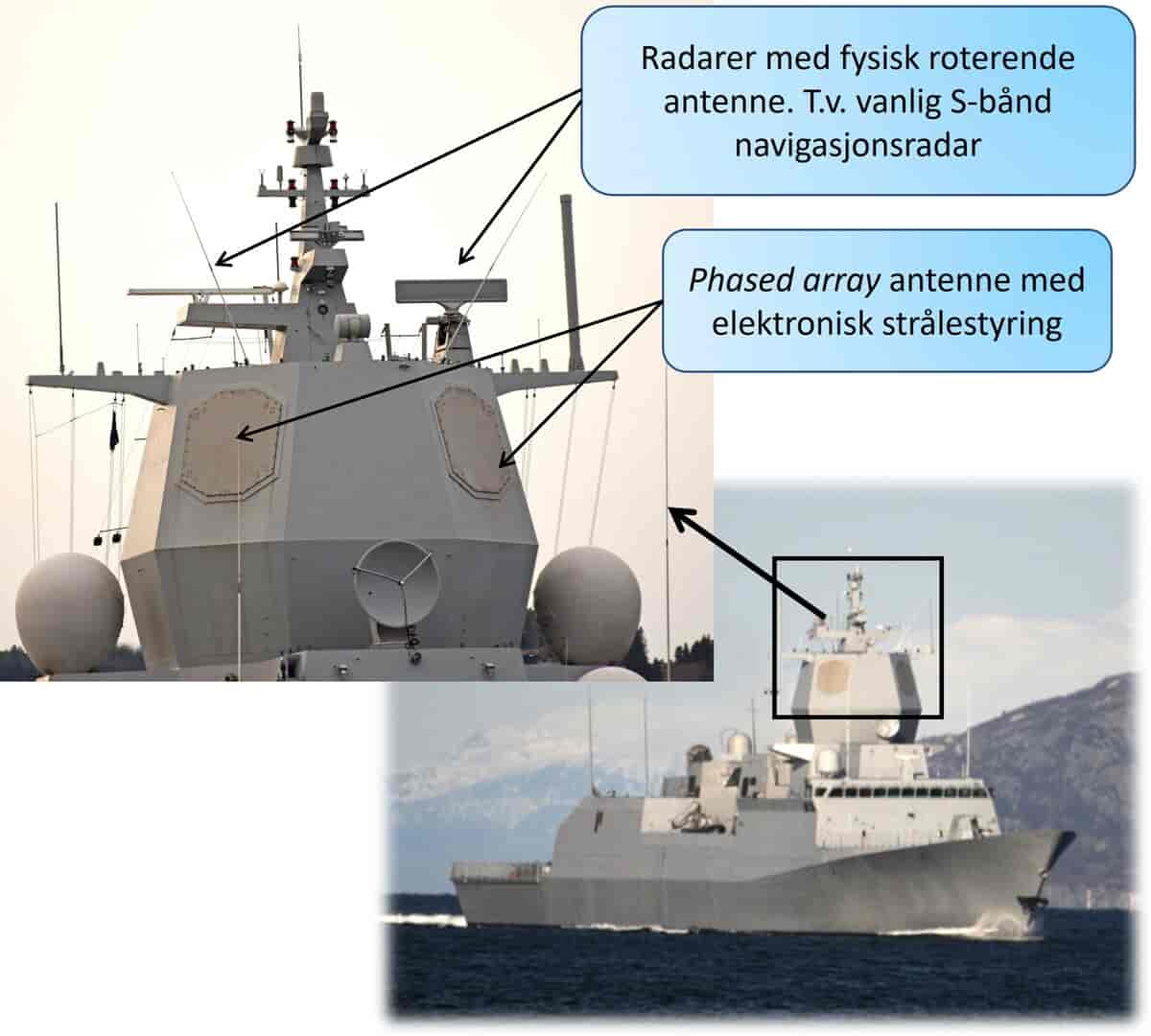
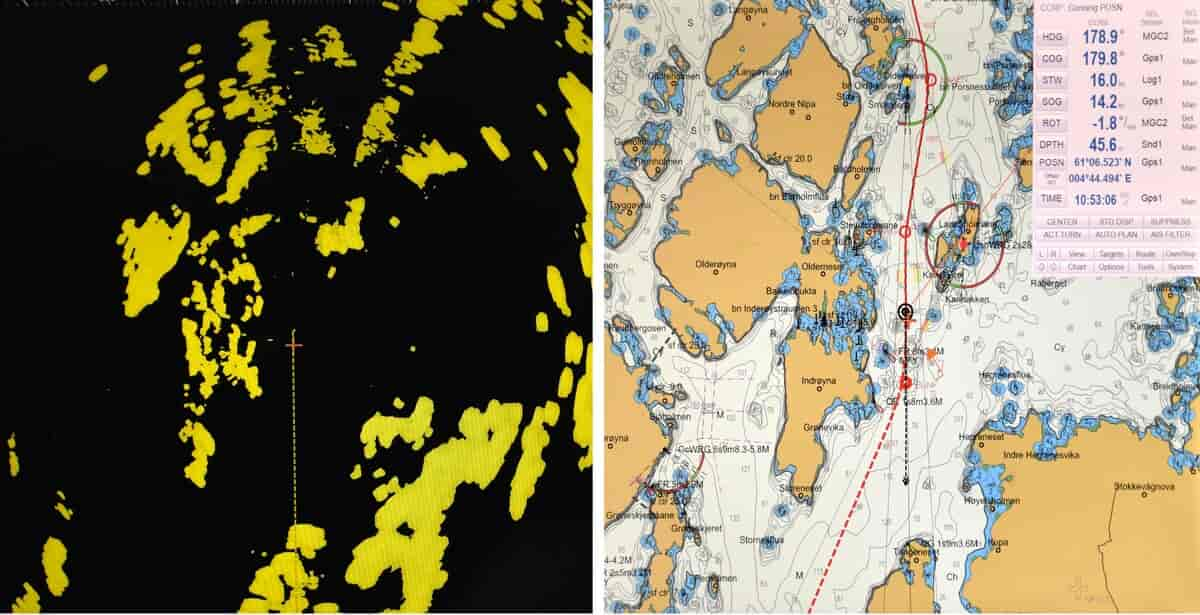
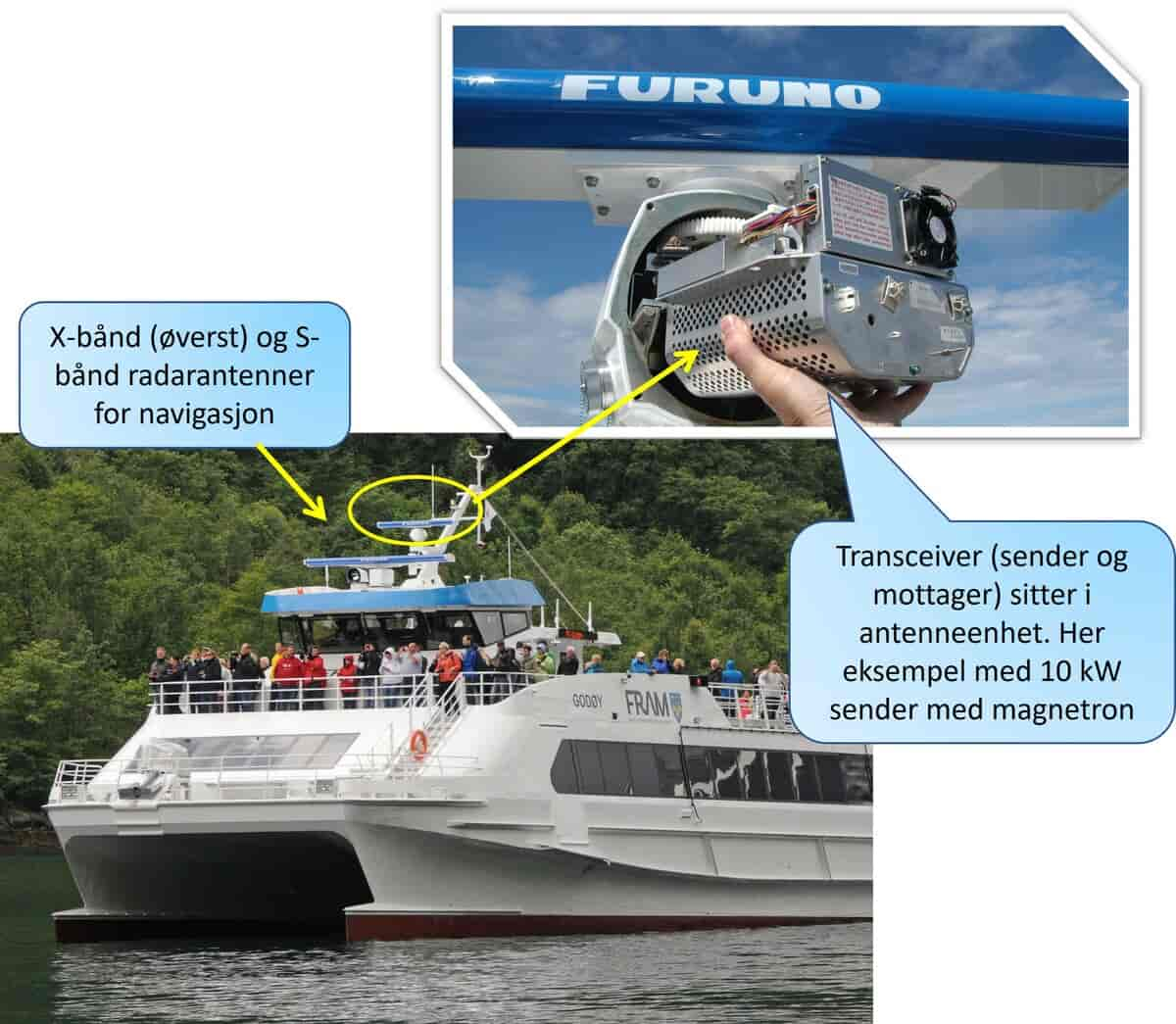
I årene rett etter andre verdenskrig gikk utviklingen raskt, og både handelsskip og havgående fiskefartøy fikk installert radar – gjerne fra britiske firma som Decca, Marconi og Kelvin Hughes, men også amerikanske RCA kunne tilby radarer for sivilt bruk. De vanligste radarene som benyttes på skip i dag, og som er et krav fra IMO, skiller seg prinsipielt ikke så mye fra systemene som ble vanlige i årene etter andre verdenskrig, men ytelse og brukervennlighet er betydelig forbedret.




Kommentarer
Kommentarer til artikkelen blir synlig for alle. Ikke skriv inn sensitive opplysninger, for eksempel helseopplysninger. Fagansvarlig eller redaktør svarer når de kan. Det kan ta tid før du får svar.
Du må være logget inn for å kommentere.