Strømmålinger trengs for å beregne transport i havet (for eksempel hvor store vannvolum som hvert sekund transporteres i Den norske atlanterhavsstrømmen eller for å finne hvilken vei og hvor raskt ting driver i sjøen.) Strømvektoren har tre komponenter, to horisontale (øst-vest og nord-sør) og en vertikal (opp-ned). Horisontal-komponentene er som regel mye kraftigere enn den vertikale komponenten og derfor enklere å måle.
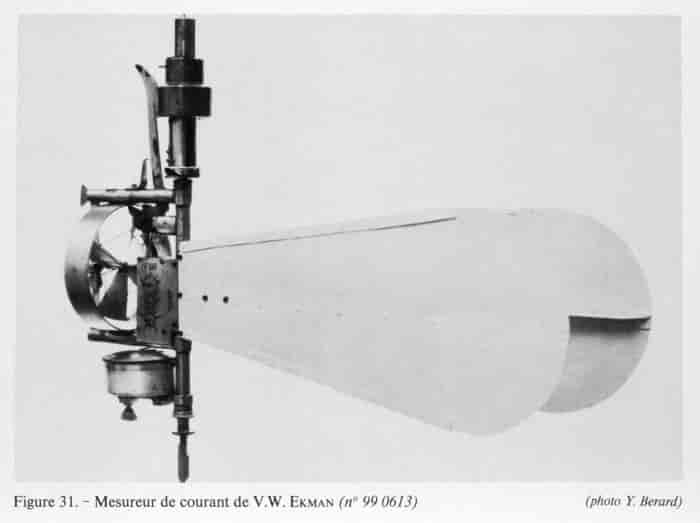
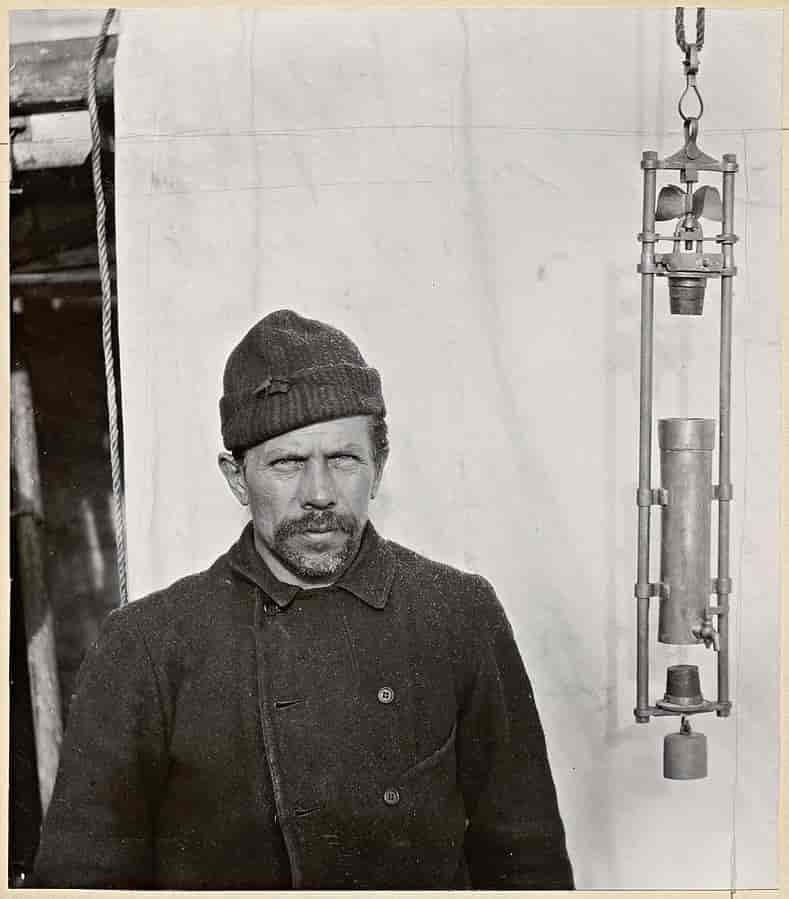
Til bestemmelse av horisontale havstrømmers fart og retning brukes strømmålere av forskjellig konstruksjon. De fleste har en propell eller rotor som drives av strømmen, mens en fløy styrer instrumentet i strømmens retning. Prototypen ble laget av den svenske havforskeren Vagn Walfrid Ekman i 1903. Den hadde et kompass og en sylinder delt inn i ti-graders kompass-sektorer til å bestemme strømretningen. Med jevne mellomrom ble kuler sluppet ned fra en beholder festet til fløyen. Strømretningen ble bestemt av hvilken av kompass-sektorene som hadde flest kuler. Ulempen med dette instrumentet var at man måtte hale opp instrumentet før hver ny måling.
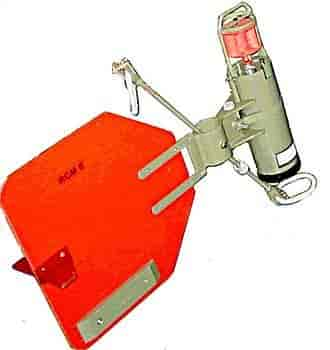
Seksti år seinere utviklet nordmennene Odd Dahl, Thor Kvinge, Håkon Mosby og Ivar Aanderaa en strømmåler som kunne måle over lang tid i strekk og på store dyp. Den såkalte RCM (Recording Current Meter eller Rotor Current Meter) har blitt mye brukt av oseanografer over hele verden, og er fortsatt i bruk. Den har en dataenhet som lagrer målte verdier av fart og retning i tillegg til sjøvannets elektriske ledningsevne (for beregning av saltholdighet), temperatur og trykk (det vil si dyp). Målingene er styrt av en klokke og skjer i gitte intervall. Fartsmålingen har en nøyaktighet på 1 cm/s eller 4 % av farten som er målt, alt etter hva som er størst.
Alle tre komponentene, altså også den svake strømmen i vertikal retning, kan bestemmes ved hjelp av lydhastighetsmålere (Dopplersonarer). Slike strømmålere kalles ADCP (eng: Acoustic Doppler Current Profiler), og kom i bruk på 1980-tallet. De bygger på prinsippet om at lydbølgene endrer frekvens når de forplanter seg i vann som beveger seg i forhold til måleren (Doppler-forskyvning). Instrumentet sender ut lydbølger i minst tre ulike retninger. Partikler i strømmen sprer lydbølgene tilbake til instrumentet, og av Doppler-forskyvningen finner man hastighetskomponentene. Ordet Profiler betyr at strømmen kan bestemmes i nesten hele vannsøylen, fra et stykke under overflaten og ned til der ADCPen er forankret. (Den kan også være montert på skroget til et skip, og da kikker den nedover.) Det er imidlertid et problem at de øverste meterne av vannsøylen, som ofte er de mest interessante med hensyn til strøm, ikke kan dekkes av ADCPen grunnet forstyrrelser fra havoverflaten. Andre akustiske strømmålere bestemmer strømhastigheten ved å måle forskjellen i lydbølgenes hastighet når de forplanter seg med og mot strømmen.
Doppler-forskyvningen i høyfrekvens-radar signaler kan brukes til å bestemme overflatestrøm. Det er da strømkomponenten langs radarens siktelinje som kan bestemmes. Derfor kreves det krysspeiling fra flere radarer for å bestemme overflatestrømmens styrke og retning.
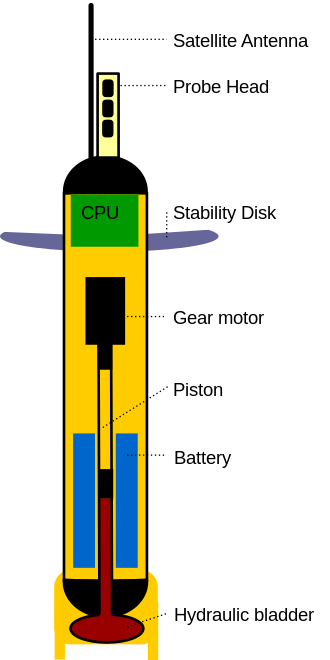
Et annet prinsipp for strømmåling er å følge gjenstander som driver med strømmen. Under overflaten kan man bruke et flytelegeme som kan holde seg svevende i et bestemt dyp, og dets posisjon kan bestemmes ved at det sender ut lydsignaler.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
Kommentarer
Kommentarer til artikkelen blir synlig for alle. Ikke skriv inn sensitive opplysninger, for eksempel helseopplysninger. Fagansvarlig eller redaktør svarer når de kan. Det kan ta tid før du får svar.
Du må være logget inn for å kommentere.